Vilka är de viktigaste övervägandena vid bedömning av säkerhet för samverkande robotar?
Bidraget med av DigiKeys nordamerikanska redaktörer
2024-04-03
Samverkande robotar är utformade för att arbeta med människor och stödja rörlig produktion i fabriker med Industry 4.0. Jämfört med traditionella industrirobotar är samverkande robotar enklare, lättare att konfigurera och kräver inte skyddade avgränsade arbetsutrymmen. Eftersom samverkande robotar är utformade för att arbeta med människor är de utformade på ett annat sätt än andra industrirobotar, med funktioner som t.ex. detekteringssystem för att undvika kollisioner, kraftåterkoppling, elastiska ställdon och servomotorer med låg tröghet.
Eftersom samverkande robotar är annorlunda i sin konstruktion har särskilda säkerhetsstandarder utvecklats för dem. ISO/TS (internationella organisationen för standardisering och teknisk specifikation) 15066 preciserar säkerhetskraven för industriella samverkande robotar och deras arbetsmiljöer. Den kompletterar kraven och vägledningen för verksamheter med samverkande robotar i standarderna ISO 10218-1 och ISO 10218-2.
Artikeln beskriver kortfattat kraven i standarden ISO/TS 15066 och hur de passar in med standarderna ISO 10218-1 och 10218-2. Därefter behandlas samarbetets komplexitet, inklusive hur den gemensamma arbetsytan definieras. Faktorer relaterade till robotsäkerhet undersöks, som t.ex. inbyggda säkerhetsfunktioner i samverkande robotar, och vilka externa säkerhetsfunktioner som kan behövas, tillsammans med exempel på enheter såsom närhetssensorer, ljusridåer och säkerhetsmattor. Artikeln avslutas med en kort genomgång av några tillämpningar som är särskilt betydelsefulla för samverkande robotar ur säkerhetssynpunkt.
Det finns flera viktiga säkerhetsstandarder för industrirobotar och samverkande robotar. Standarden ISO/TS 15066 beskriver säkerhetskraven för industriella system med samverkande robotar och industriell arbetsmiljö och skrevs för att bygga vidare på, och komplettera, de begränsade kraven i tidigare standarder som t.ex. ISO 10218. Standarden ISO 10218-1 fokuserar på generella robotar och robotenheter, medan standarden ISO 10218-2 fokuserar på robotsystem och integration. Standarden ANSI/RIA (American National Standards Institute/Robotics Industry Association) R15.06 är en nationell anpassning av standarderna ISO 10218-1 och ISO 10218-2.
Samarbetets komplexitet
Innan vi går in på detaljerna kring säkerhet hos samverkande robotar är det bra att definiera begreppet samverkan. Samverkan inom robotteknik är komplicerat och består av tre faktorer:
- En samverkande robot är, enligt standarden ANSI/RIA R15.06, en "robot utformad för direkt interaktion med en människa inom en definierad gemensam arbetsyta".
- En samverkande verksamhet är, enligt standarden ISO/TS 15066, ett "tillstånd där ett ändamålsenligt utformat robotsystem och en operatör arbetar i en gemensam arbetsyta".
- Slutligen beskriver standarden ANSI/RIA R15.06. att en gemensam arbetsyta är den "arbetsyta inom det skyddade utrymmet där roboten och en människa under produktionen kan utföra uppgifter samtidigt".
Det handlar om en definition av den gemensamma arbetsytan "inom det skyddade utrymmet". Det skyddade utrymmet har en nivå av säkerhet utöver de vanliga säkerhetsfunktioner som ingår i samverkande robotar.
Vanliga skyddsfunktioner som integreras i samverkande robotar är system för avkänning av kontakt som baseras på mätningar av moment i varje led och känner av oväntade stötar, hinder eller överdrivna krafter och vridmoment. Det bör också finnas automatiska bromssystem och manuell frigöring av broms för att kunna flytta på armen utan tillgång till ström.
Oväntad kontakt mellan en person och en samverkande robot är ett särskilt bekymmer. Standarderna föreskriver att kontakt med någon del av en persons huvud ska förhindras. Standarden delar dessutom in kroppen i 29 specifika områden och anger begränsningar för två typer av kontakt:
- Transient kontakt är en rörlig, dynamisk händelse där den samverkande roboten stöter till en person. Begränsningarna baseras på plats, tröghet och relativ hastighet.
- Kvasistatisk kontakt uppstår när en kroppsdel kläms fast mellan den samverkande roboten och en yta. Begränsningarna baseras på tryck och kraft relaterat till press- och klämpåverkan.
Specifikationen tillhandahåller vägledning, och inte absoluta gränsvärden, baserat på överväganden för tillämpningen. Den anger också att vägledningen är informativ och återspeglar de för tillfället bästa metoderna eftersom samverkan mellan människor och robotar är ett nytt område och forskning pågår.
Oavbruten samverkan
Det finns inte bara en enda samarbetstillämpning. Människor och samverkande robotar kan interagera och samverka på ett oändligt antal sätt. Tillämpningarns för samverkan sträcker sig från samexistens, där en robot stannar när en person kommer in i den gemensamma arbetsytan, till en interaktiv aktivitet där personen rör vid coboten när den är i drift (figur 1).
 Figur 1: För samarbete mellan människor och robotar finns det många möjliga interaktionsnivåer. (Bildkälla: SICK)
Figur 1: För samarbete mellan människor och robotar finns det många möjliga interaktionsnivåer. (Bildkälla: SICK)
En riskbedömning krävs för att identifiera säkerhetsbehoven i enskilda samverkanstillämpningar. Den omfattar identifiering, utvärdering och minimering av de faror och risker som är förknippade med tillämpningen. Standarden ISO 10218 innehåller en lista över säkerhetsfunktioner som kan vara lämpliga vid olika omständigheter, men inga definitiva krav. Standarden ISO/TS 15066 innehåller ytterligare information om riskbedömningar för samverkande robotar. Målet med riskbedömningen är att i varje enskilt fall identifiera vilka externa säkerhetsanordningar och säkerhetssystem som behövs för att säkerställa en säker implementering i samverkanstillämpningar.
See artikeln "Säker och effektiv integrering av autonoma mobila robotar för maximal nytta i verksamheter med Industry 4.0", för en djupare analys av riskbedömning och robotar.
Skydd och effektivitet
Även om samverkande robotar är konstruerade för säker drift kan ytterligare nivåer av skydd förbättra samverkanstillämpningarnas effektivitet. När en person kommer in i den gemensamma arbetsytan kräver standarden ISO/TS 15066 en maximal hastighet på 0,25 m/s per axel, om inget ytterligare skydd finns. För de flesta samverkande robotar är detta mycket långsamt.
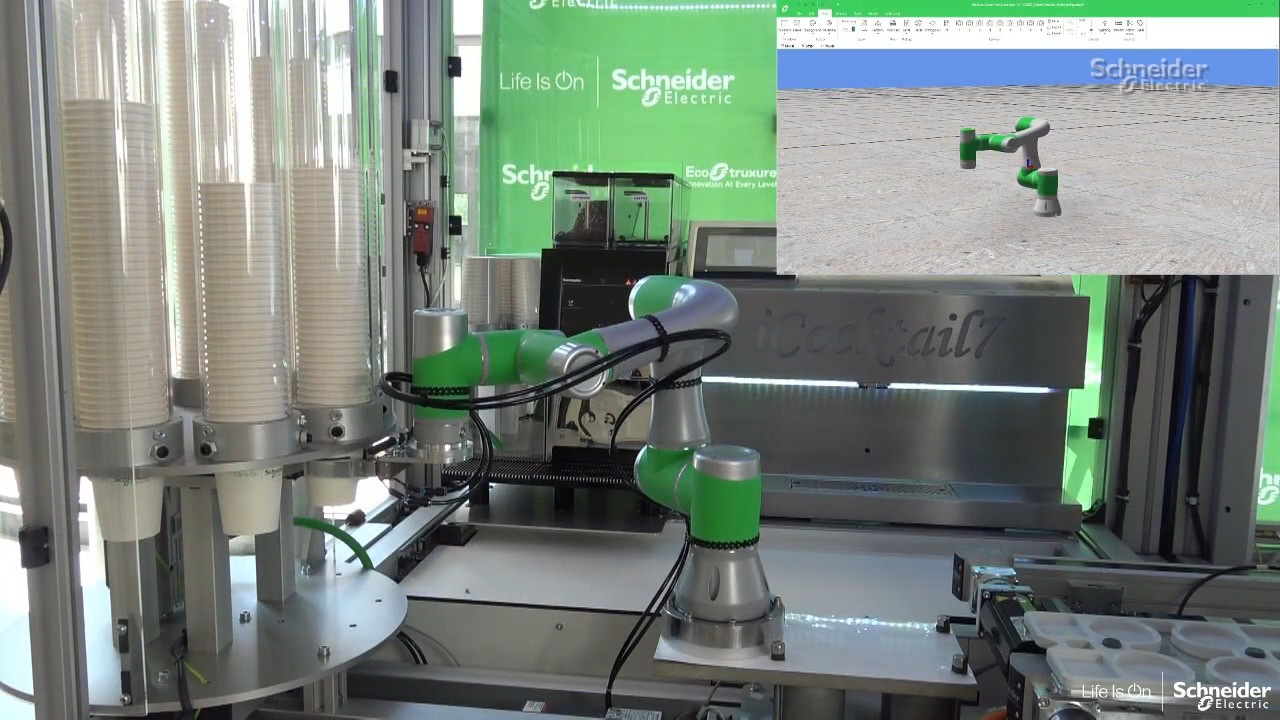
Den samverkande roboten Lexium LXMRL12S0000 från Schneider Electric har till exempel en maximal nyttolast på 12 kg, en arbetsradie (arbetsområde) på 1 327 mm, en noggrannhet för positionering på ±0,03 mm och en maximal hastighet i verktygsänden på 3 m/s, d.v.s. 12 gånger snabbare än den högsta tillåtna hastigheten enligt standarden ISO/TS 15066 när en person befinner sig i den gemensamma arbetsytan (figur 2).
 Figur 2: Den samverkande roboten kan röra sig 12 gånger snabbare än den högsta tillåtna hastigheten i standarden ISO/TS 15066 för när en person befinner sig i den gemensamma arbetsytan. (Bildkälla: Schneider Electric)
Figur 2: Den samverkande roboten kan röra sig 12 gånger snabbare än den högsta tillåtna hastigheten i standarden ISO/TS 15066 för när en person befinner sig i den gemensamma arbetsytan. (Bildkälla: Schneider Electric)
Den samverkande roboten kan i många tillämpningar arbeta ensam under långa perioder. Genom att känna av en människas närvaro eller frånvaro i den gemensamma arbetsytan kan man alltså få en mycket snabbare drift och högre effektivitet när ingen är närvarande. Säkerhetsskannrar, ljusridåer och säkerhetsmattor är vanligt förekommande anordningar för att känna av en människas närvaro. Respektive teknik har olika fördelar och de kombineras ofta.
Säkerhetsskannrar
Säkerhetsskannrar övervakar ett bestämt område för att känna av närvaro av personer. De kan avgöra hur långt bort en person befinner sig och kan utöver den aktiva säkerhetszonen implementera olika varningszoner.
Modellen OS32C-SP1-4M från Omron är ett bra exempel på en säkerhetsskanner som är avsedd för användning med samverkande robotar. Den har en säkerhetsradie på upp till 4 m och kan stödja flera varningszoner på ett avstånd upp till 15 m. Den innehåller 70 standarduppsättningar med kombinationer av säkerhets- och varningszoner för att stödja komplexa gemensamma ytor. Den minsta upplösningen för ett föremål kan dessutom ställas in på 30, 40, 50 eller 70 mm, och svarstiden kan varieras, från 80 upp till 680 ms, vilket ökar flexibiliteten i tillämpningen ytterligare (figur 3).
 Figur 3: Säkerhetsskannern har en säkerhetsradie på upp till 4 m och kan stödja flera varningszoner på ett avstånd upp till 15 m. (Bildkälla: DigiKey)
Figur 3: Säkerhetsskannern har en säkerhetsradie på upp till 4 m och kan stödja flera varningszoner på ett avstånd upp till 15 m. (Bildkälla: DigiKey)
Ljusridåer
Ljusridåer kan upptäcka en persons närvaro och kan utformas för att upptäcka objekt av olika storlekar, som t.ex. fingrar eller händer. Till skillnad från en säkerhetsskanner mäter en ljusridå inte avstånd. Ljusridåer skickar en serie ljusstrålar mellan linjära sändar- och mottagarenheter och kan känna av när ett föremål bryter en eller flera strålar.
När det gäller säkerhetsklassificering finns det två primära klassificeringar för ljusridåer, typ 2 och typ 4. De har liknande yttre utseende men är utformade för att tillhandahålla olika nivåer av säkerhet. Ljusridåer av typ 4 övervakar det skyddade utrymmet som definieras som en gemensam arbetsyta. Ljusridåer av typ 2 är avsedda för tillämpningar med lägre risk.
Ljusridåer skyddar den avgränsande ytan och finns med flera olika nivåer av upplösning, som t.ex. 14 mm för detektering av fingrar och 24 mm för detektering av händer. Modellen SLC4P24-160P44 från Banner Engineering är en ljusridå av typ 4 med en sändar- och mottagarenhet och en upplösning på 24 mm för att skydda människor och maskiner som t.ex. samverkande robotar (figur 4). Sändarenheten har en rad synkroniserade modulerade infraröda lysdioder. Mottagarenheten har en motsvarande rad med synkroniserade fotodetektorer. Sändarenheten har en räckvidd på 2 m och ljusridåerna kan installeras på ett avstånd mellan 160 och 320 mm, i steg om 80 mm.
 Figur 4: Denna ljusridå av typ 4 har en upplösning på 24 mm. (Bildkälla: Banner Engineering)
Figur 4: Denna ljusridå av typ 4 har en upplösning på 24 mm. (Bildkälla: Banner Engineering)
Säkerhetsskannrar och ljusridåer är beröringsfria metoder för att förbättra säkerheten i gemensamma arbetsytor. De kan dock vara svåra att använda i optiskt utmanande miljöer som t.ex. områden med starkt reflekterande ytor, som kan skapa oönskade ljusstörningar, samt att de kan utlösas på grund av läckande olja eller fett, eller för mycket damm och fukt.
Några av dessa optiska sensorer har justeringar för känslighet som gör det lättare att dämpa vissa typer av störningar. Känslighetsjusteringarna kan även leda till längre svarstider och andra prestandakompromisser. En annan lösning är att använda en säkerhetsmatta tillsammans med optiska avkänningsanordningar.
Säkerhetsmattor
Säkerhetsmattor har två ledande plattor som skiljs åt av ett rutmönstrat isolerande lager och kan användas enskilt eller i kombination med andra typer av sensorer. Om en person kliver på mattan trycks den övre ledande plattan ned och kommer i kontakt med den nedre plattan, vilket utlöser en varningssignal (figur 5). Utsidan av mattorna består av ett halksäkert polyuretanmaterial som tål vatten, smuts och olja. Säkerhetsmattan SENTIR 1602-5533 från ASO Safety Solutions kan ansluta upp till 10 mattor i serie till en enda övervakningsenhet för en maximal täckning på 10 m2.
 Figur 5: När man trampar på säkerhetsmattan kommer det övre och nedre ledande skiktet i kontakt med varandra och en varningssignal aktiveras. (Bildkälla: ASO Safety Solutions)
Figur 5: När man trampar på säkerhetsmattan kommer det övre och nedre ledande skiktet i kontakt med varandra och en varningssignal aktiveras. (Bildkälla: ASO Safety Solutions)
Säkerheten finns i detaljerna
Det finns ingen enskild formel som garanterar säkerhet. Alla samverkanstillämpningar är olika och måste hanteras utifrån sina unika egenskaper och krav. En viktig faktor är, var på samverkansskalan som tillämpningen befinner sig (se figur 1). Ju mer interaktion mellan den samverkande roboten och personer, desto mer skydd behövs.
Det finns fler detaljer att ta hänsyn till. Några av dem inkluderar:
- Respektive plats måste genomgå en grundlig riskbedömning för att se om den samverkande roboten har flyttats från arbetsstation till arbetsstation. Även om de ser likadana ut kan små variationer göra skillnad för säkerheten.
- Om det finns andra maskiner i den gemensamma arbetsytan, behöver de då kopplas till system för nödstopp eller till den samverkande robotens säkra och långsammare drift?
- Artikeln har fokuserat på hårdvara relaterad till säkerhet, men för nätverksanslutna system, som blir allt vanligare, är cybersäkerhet en viktig faktor för att förhindra störningar i den samverkande robotens drift eller säkerhetssystem.
Sammanfattning
Säkerhet för samverkande robotar är komplicerat. Den börjar med definition av den gemensamma arbetsytan inom det skyddade utrymmet och kräver en riskbedömning av den gemensamma verksamheten. Standarder som t.ex. ISO/TS 15066 och ISO 10218 är viktiga och innehåller rekommendationer och riktlinjer. Samverkande robotar har grundläggande säkerhetsfunktioner som t.ex. detekteringssystem för att undvika kollision, kraftåterkoppling, elastiska ställdon och servomotorer med låg tröghet. Beroende på hur tillämpningen för samarbetet ser ut kan ytterligare säkerhetsanordningar som t.ex. närhetssensorer, ljusridåer och säkerhetsmattor behövas.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.