Sortera bland teknikvalen för närhets- och avståndssensorer
Bidraget med av DigiKeys nordamerikanska redaktörer
2024-09-18
Att använda närhets- och avståndssensorer för att känna av närvaro och placering av föremål utan fysisk kontakt och kan vara en viktig aspekt vid styrning av industriella processer som materialhantering, jordbruksmaskiner, tillverknings- och monteringsverksamhet samt förpackning av livsmedel, drycker och läkemedel.
Sensorerna finns i en mängd olika tekniker, som t.ex. fotoelektriska sensorer, lasersensorer, induktiva sensorer, kapacitiva sensorer, magnetiska sensorer och ultraljudsensorer. När man ska välja det bästa alternativet för en tillämpning måste man ta hänsyn till faktorer som räckvidd, storlek, noggrannhet, känslighet, upplösning och kostnad.
En viktig faktor i många tillämpningar är materialet i det objekt som ska kännas av. Vissa sensorer beter sig annorlunda med hårda ytor respektive ytor med fibrer, och andra sensorer kan påverkas av objektets färg eller reflektionsförmåga.
Den här artikeln går igenom vanligt förekommande teknologier för beröringsfria närhetssensorer och tittar på hur de fungerar, deras grundläggande prestandaegenskaper och exempel på sensorer från SICK, tillsammans med några avsedda tillämpningar.
Fotoelektriska sensorer
Fotoelektriska sensorer, som de fotoelektriska närhetssensorna W10 från SICK, är enkla att använda och installera och finns med en rad olika funktioner som passar i många olika tillämpningar. Den robusta konstruktionen hos W10-sensorerna gör dem lämpliga för exakt detektering av objekt i utmanande miljöer. Den inbyggda pekskärmen snabbar upp inställningen av parametrar och driftsättningen av sensorer (figur 1).
 Figur 1: Pekskärmen på dessa fotoelektriska sensorer skyndar på driftsättning och distribution. (Bildkälla: SICK)
Figur 1: Pekskärmen på dessa fotoelektriska sensorer skyndar på driftsättning och distribution. (Bildkälla: SICK)
Tillgängliga förprogrammeringar gör det möjligt för konstruktörer att anpassa sensorerna till specifika tillämpningskrav. Dessutom innebär integrerade funktioner som hastighetsinställningar, standard- och precisionsmätningslägen samt dämpning i förgrund och bakgrund att en enda sensor kan användas i en mängd olika tillämpningar. Sensorserien omfattar fyra varianter som skiljer sig åt i fråga om driftavstånd och monteringsalternativ.
Bakgrundsdämpning
Fotoelektriska närhetssensorer med bakgrundsdämpning (BGS) använder triangulering mellan de sändande och mottagande elementen. Signaler från objekt som befinner sig bakom det inställda avkänningsområdet dämpas. SICK:s teknik för bakgrundsdämpning ignorerar dessutom starkt reflekterande föremål i bakgrunden och kan hantera svåra ljusförhållanden i omgivningen.
Bakgrundsdämpning är särskilt användbart när målobjektet och bakgrunden (t.ex. ett transportband) har liknande reflektivitet eller om bakgrundens reflektivitet varierar och kan orsaka störningar i detekteringen.
Förgrundsdämpning
Fotoelektriska närhetssensorer med förgrundsdämpning (FGS) kan känna av objekt på ett definierat avstånd. Alla objekt som befinner sig mellan sensorn och avkänningsavståndet (inställt mot bakgrunden) känns av. För att garantera en tillförlitlig avkänning måste bakgrunden vara relativt ljus och får inte variera i höjdled.
När objekten befinner sig på en reflekterande yta, som t.ex. ett vitt eller ljust transportband, kan förgrundsdämpning förbättra detekteringen. I stället för att detektera ljus som reflekteras från föremålet, känner sensorn av föremålet genom frånvaron av det ljus som reflekteras av transportbandet.
Retroreflekterande
I en retroreflekterande sensor träffar det utsända ljuset en reflektor och det reflekterade ljuset utvärderas av sensorn. Felen kan minimeras genom att använda polariserande filter. Plastfilmer och plastförpackningar som är genomskinliga kan störa dessa sensorer. Att minska sensorns känslighet kan göra det lättare att övervinna dessa utmaningar. Genom att ersätta vanliga IR-ljuskällor med lasrar kan man dessutom få längre avkänningsavstånd och högre upplösning.
Prestandan hos retroreflekterande sensorer kan förbättras med hjälp av en lägre omkopplingshysteres än normalt. Med dessa konstruktioner kan även minimal ljusdämpning mellan sensorn och reflektorn, t.ex. orsakad av glasflaskor, kännas av på ett tillförlitligt sätt. SICK har även ett övervakningssystem som heter AutoAdapt och kontinuerligt reglerar och anpassar gränsvärdet för omkoppling med referens för på den gradvisa uppbyggnaden av föroreningar som kan leda till att avkänningssystemet slutar fungera.
Genomgående stråle
I motsats till retroreflekterande sensorer använder genomstrålande sensorer två aktiva enheter: en sändare och en mottagare. Genomstrålande avkänning möjliggör längre avkänningsområden. Genom att ersätta IR-sändarna med laserdioder kan avkänningsavståndet ökas ytterligare samtidigt som en hög upplösning och exakt avkänning bibehålls.
Fiberoptik
Fiberoptiska sensorer är en variant av genomstrålande sensorer. I en fiberoptisk fotoelektrisk sensor är sändaren och mottagaren inkapslade i ett enda hölje. Separata fiberoptiska kablar används av sändaren och mottagaren. Dessa givare är särskilt lämpade för användning i tillämpningar med höga temperaturer och i farliga och hårda miljöer.
Matriser med fotoelektriska sensorer
Familjen RAY26 Reflex Array med fotoelektriska sensorer som modell 1221950 möjliggör tillförlitlig avkänning av platta objekt och snabb driftsättning. I kombination med en reflektor kan de fotoelektriska sensorerna även känna av små, platta, transparenta eller ojämna objekt ända ned till 3 mm. Inom en 55 mm hög, enhetlig ljusmatris känner sensorerna av objektets framkant. Det innebär att även perforerade objekt kan kännas av på ett tillförlitligt sätt utan komplicerad omkoppling (bild 4).
 Figur 2: Fotoelektriska sensormatriser kan känna av objekt ända ned till 3 mm i ett 55 mm högt fält. (Bildkälla: SICK)
Figur 2: Fotoelektriska sensormatriser kan känna av objekt ända ned till 3 mm i ett 55 mm högt fält. (Bildkälla: SICK)
Laseravståndssensorer
Konstruktörer av tillämpningar som nivåövervakning i förvaringsbehållare, positionsdetektering av föremål på transportband, XY-positionering av axeln i automatiserade gaffeltrucksystem, vertikal positionering av kranar och traverser i lagerlokaler samt diameterövervakning vid lindning av spolar kan använda sig av laseravståndssensorerna DT50 . Sensorerna stöder avståndsmätningar med Time of Flight (ToF) på upp till flera meter med hjälp av reflekterat laserljus för att ge immunitet mot omgivande belysning samt exakt och tillförlitlig drift.
DT50-2B215252 har exempelvis en räckvidd på 200 till 30 000 mm och flera specialfunktioner, bl.a:
- Tåligt hölje med kapslingsklassificering IP65 och IP67
- Kan tillhandahålla upp till 3000 avståndsmätningar per sekund
- Minsta svarstid på 0,83 ms
- Kompakt hölje för en rad olika tillämpningar, från industrirobotar till mätning av fyllningshöjd i förvaringsbehållare
Högupplösta mätningar med hjälp av statistik
HDDM+ (High-definition distance measurement plus) är en högupplöst ToF-mätteknik som kan användas i laseravståndssensorer och LiDAR-sensorer (Light Detection and Ranging). Till skillnad från sensorteknik med enstaka pulser eller faskorrelation är HDDM+ en statistisk mätprocess.
Sensorns programvara utvärderar ekona från flera laserpulser statistiskt, för att filtrera bort störningar från källor som glasrutor, dimma, regn, damm, snö, löv, staket och andra föremål för att beräkna avståndet till det avsedda målet. Det medför en avståndsmätning med en hög säkerhetsnivå även under utmanande omgivningsförhållanden (figur 5).
 Bild 3: Programvaran HDDM+ från SICK använder en statistisk utvärderingsprocess för att eliminera "brus" från t.ex. glasrutor, dimma, regn, damm, snö, löv och staket. (Bildkälla: SICK)
Bild 3: Programvaran HDDM+ från SICK använder en statistisk utvärderingsprocess för att eliminera "brus" från t.ex. glasrutor, dimma, regn, damm, snö, löv och staket. (Bildkälla: SICK)
Typiska användningsområden för tekniken HDDM+ är avståndsmätning för kvalitetskontroll inom elektronikproduktion, flerdimensionell LiDAR-detektering och positionsbestämning av objekt inom maskin- och anläggningsteknik samt positionsbestämning av traverser eller fordon.
Sensorerna med HDDM+ har ett avkänningsavstånd på upp till 1,5 km på retroreflekterande tejp. Modell DT1000-S11101 har exempelvis en räckvidd på upp till 460 m med en typisk mätnoggrannhet på ±15 mm för naturliga objekt och en justerbar upplösning från 0,001 till 100 mm.
Induktiva sensorer
Induktiva närhetssensorer som IME-serien från SICK kan känna av järnhaltiga och icke-järnhaltiga metallföremål. Sensorerna består av en resonant krets med induktor-kondensator (LC) som genererar ett högfrekvent växlande elektromagnetiskt fält. Fältet dämpas när ett metallföremål kommer in i avkänningsområdet. Dämpningen detekteras av signalutvärderingskretsen och en förstärkare som producerar utsignalen (bild 4).
 Bild 4: En enkel induktiv närhetssensor består av en LC-krets som producerar ett växlande fält, en signalutvärdereringskrets och en förstärkare. (Bildkälla: SICK)
Bild 4: En enkel induktiv närhetssensor består av en LC-krets som producerar ett växlande fält, en signalutvärdereringskrets och en förstärkare. (Bildkälla: SICK)
Två viktiga specifikationer för avkänningsavståndet för olika typer av närhetssensorer är det nominella avkänningsavståndet (Sn) och det säkrad avkänningsavståndet (Sa). Sn tar inte hänsyn till tillverkningstoleranser eller yttre påverkan som driftstemperatur. Sa tar hänsyn till både tillverkningstoleranser och variationer i driftsförhållanden. Sa är normalt cirka 81 % av värdet för Sn. Den induktiva sensorn av modell IME08-02BPSZT0S har exempelvis en Sn på 2 mm och en Sa på 1,62 mm.
Kapacitiv avkänning
På samma sätt som induktiva sensorer använder kapacitiva närhetssensorer en oscillator. I det här fallet används en öppen kondensator där den aktiva elektroden i sensorn skapar ett elektrostatiskt fält i förhållande till jord. Sensorerna kan känna av närvaron av en stor mängd material, inklusive metalliska och icke-metalliska föremål.
När ett föremål kommer in i det elektrostatiska fältet ändras svängningarnas amplituder i resonanskretsen beroende på materialets dielektriska egenskaper. Signalutvärderingskretsen känner av förändringen och en förstärkare producerar utsignalen (bild 5).
 Figur 5: I en kapacitiv närhetssensor producerar en oscillerande krets ett elektrostatiskt fält som ändrar egenskaper när målet som ska kännas av kommer in i fältet. (Bildkälla: SICK)
Figur 5: I en kapacitiv närhetssensor producerar en oscillerande krets ett elektrostatiskt fält som ändrar egenskaper när målet som ska kännas av kommer in i fältet. (Bildkälla: SICK)
Precis som för induktiva närhetssensorer finns det flera specifikationer för avkänningsavståndet för kapacitiva närhetssensorer, bland annat Sn, Sa och en reduktionsfaktor. Till exempel har modellen CM12-08EBP-KC1 en Sn på 8 mm och en nominell Sa på 5,76 mm.
Det objekt som ska kännas av måste vara minst lika stort som givarens yta och avkänningsavståndet varierar med materialets reduktionsfaktor. Reduktionsfaktorerna är relaterade till materialets dielektriska konstant och kan variera från 1 för metaller och vatten till 0,4 för polyvinylklorid (PVC), 0,6 för glas och 0,5 för keramik.
Magnetiska sensorer
Magnetiska närhetssensorer reagerar på närvaron av en magnet. Magnetiska närhetssensorer från SICK använder två detekteringstekniker:
- GMR-sensorer (Giant Magneto Resistive) är baserade på resistorer som ändrar sitt värde i närvaro av ett magnetfält. En Wheatstone-brygga används för att känna av förändringen i resistans och producera en utsignal. De cylindriska sensorerna MZT7, som t.ex. MZT7-03VPS-KP0 är konstruerade för användning i cylindrar med T-spår, använder GMR-teknik för att känna av kolvens position i pneumatiska drivenheter och liknande tillämpningar.
- LC-tekniken använder en resonanskrets som svänger med en liten amplitud. Om ett yttre magnetfält närmar sig ökar resonansamplituden. Ökningen detekteras av signalutvärderingskretsen och en förstärkare producerar utsignalen (bild 6). MM08-60APO-ZUA en Sn på 60 mm och en Sa på 48,6 mm.
 Bild 6: I en magnetisk närhetssensor kan fältproben använda GMR- eller LC-teknik. (Bildkälla: SICK)
Bild 6: I en magnetisk närhetssensor kan fältproben använda GMR- eller LC-teknik. (Bildkälla: SICK)
Ultraljudssensorer
För objekt på upp till 8 m avstånd kan konstruktörer använda ultraljudssensorer som UM30-familjen från SICK. Sensorerna har inbyggd temperaturkompensation för att förbättra mätnoggrannheten och färgoberoende objektavkänning, dammtålighet och drift upp till +70 °C. De mäter avstånd baserat på time of flight-teknik där avståndet är lika med ljudhastigheten multiplicerat med den totala akustiska time of flight-tiden (t2) där summan divideras med 2 (Figur 6).
 Figur 7: Ultraljudssensorer kan mäta avstånd baserat på ljudvågornas totala time of flight-tiden (t2). (Bildkälla: SICK)
Figur 7: Ultraljudssensorer kan mäta avstånd baserat på ljudvågornas totala time of flight-tiden (t2). (Bildkälla: SICK)
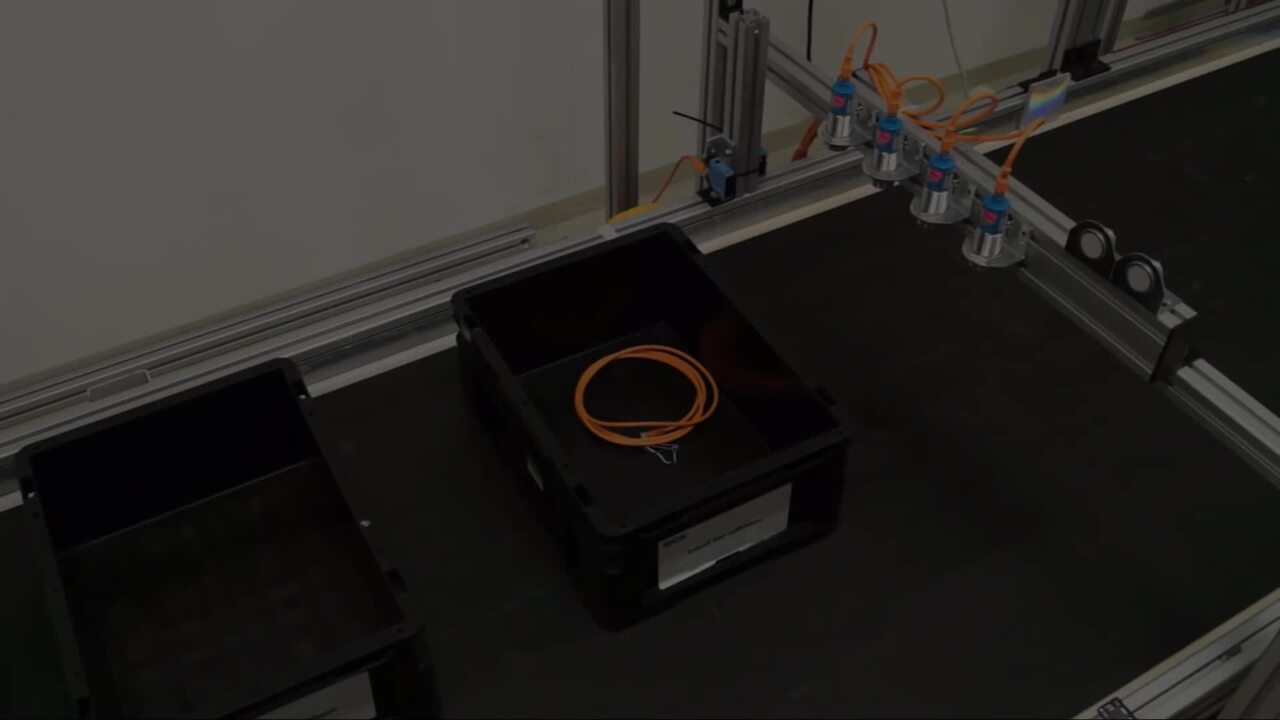
Ultraljudssensorer som modell UM30-212111 lämpar sig för tillämpningar som t.ex. övervakning av tomma behållare. En intern temperaturövervakning ger en mätnoggrannhet på ±1 %. Dessa färgoberoende sensorer kan känna av objekt som är svåra att urskilja, även i närvaro av smuts och damm.
Sammanfattning
Den goda nyheten är att det finns ett stort utbud av teknikval för närhets- och avståndssensorer. Det innebär att det finns en lösning för alla tillämpningskrav. Utmaningen är att sortera bland de många alternativen och hitta den optimala lösningen för avkänning av specifika material vid faktiska tillämpnings- och driftsförhållanden.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.