Nya piezoelektriska styrdon ger förbättrad haptisk återkoppling till bärbara pekskärmskonstruktioner
Bidraget med av DigiKeys nordamerikanska redaktörer
2020-02-13
Användargränssnitt med pekskärmar används överallt på grund av deras klara fördelar jämfört med mekaniska gränssnitt. För konsumenter är gränssnittet snyggt och intuitivt, och för användare inom industrin innebär en inkapslad display att problem med inträngande smuts och fukt kan undvikas. Men det finns nackdelar för båda användargrupperna. Till exempel kan konsumenter sakna tydligheten och tillfredsställelsen som finns i klick från en mekanisk brytare medan industrianvändare kan ha svårt att få knapptryckningar att registreras på pekskärmar när de använder handskar.
Haptisk återkoppling, där vibrationer anger att knappar aktiveras, har använts för att övervinna bristen på beröringsåterkoppling från pekskärmar, men befintliga lösningar använder ofta skrymmande och komplexa mekaniska system. Dessa inkluderar vibrationsmotorer med excentrisk roterande massa (ERM) och linjära resonanta styrdon (LRA:er). Piezoelektrisk haptisk återkoppling är ett mer kompakt och flexibelt alternativ. Till nyligen gjorde dess höga driftspänning dock tekniken svår att använda i tillämpningar med låg strömförbrukning – ett viktigt krav för batteridrivna slutprodukter.
Dock åtgärdar framstegen inom piezoelektriska "högupplösta" haptiska lösningar inte bara strömförbrukningsproblemen utan medför även andra fördelar för utformningen av haptiska gränssnitt. Några exempel är kompakt format med låg profil, återkoppling med hög kraft och snabb responstid.
Den här artikeln undersöker först kort fördelarna med nya piezoelektriska, haptiska styrdon jämfört med ERM:er och LRA:er. Därefter presenteras en ny generation av enheter som bygger på flerlagerstrukturer och bipolära drivlägen som, tillsammans med effektiva och specialiserade drivkretsar, åtgärdar tidigare strömförbrukningsproblem. Artikeln visar även hur tekniker kan utnyttja dessa styrdon och drivkretsar i sina nya produkter med pekskärmar med haptisk återkoppling med exempel på haptiska lösningar från TDK och drivkretsar från Boréas Technologies och Texas Instruments (TI).
Haptiska återkopplingsalternativ
Konstruktörer som vill lägga till haptisk återkoppling i sina pekskärmsgränssnitt kan välja mellan tre alternativ: ERM:er, LRA:er och piezoelektriska styrdon. Alla tre utnyttjar samma grundprincip där en microcontroller övervakar driften och en drivkrets styr ett styrdon för att generera vibrationer (figur 1) Skillnaderna ligger i hur vibrationerna skapas. ERM använder en excentrisk roterande vikt, LRA använder en magnetisk vikt upphängd i fjädrar och den piezoelektriska enheten bygger på den omvända piezoelektriska effekten som orsakar en förändring i dimensionerna hos ett kristall- eller keramikobjekt när det exponeras för ett elektriskt fält.
 Figur 1: Haptiska pekskärmssystem innehåller en microcontroller, en drivkrets och ett styrdon. I det här exemplet är styrdonet en piezoelektrisk enhet, men ERM:er och LRA:er är populära alternativ. (Bildkälla: Boréas Technologies)
Figur 1: Haptiska pekskärmssystem innehåller en microcontroller, en drivkrets och ett styrdon. I det här exemplet är styrdonet en piezoelektrisk enhet, men ERM:er och LRA:er är populära alternativ. (Bildkälla: Boréas Technologies)
ERM:er och LRA:er har varit populära i bärbara konstruktioner eftersom de erbjuder ett lågspänningsalternativ (cirka 3 volt) och endast behöver en enkel drivkretsutformning. Konventionella piezoelektriska enheter kräver mycket högre spänningar (upp till 200 volt) för att generera tillräcklig mekanisk deformering för en bra användarupplevelse. De höga spänningarna krävs för att konventionell piezoelektrisk haptisk drivkretsteknik typiskt sett bygger på neddimensionerad ljudförstärkarteknik, istället för att ha utformats från grunden med låg strömförbrukning i åtanke. Ytterligare en konstruktionsutmaning har varit bristen på specialiserade strömsnåla haptiska styrdonsdrivkretsar, vilket tvingat konstruktörerna att välja mindre effektiva lösningar.
Dock har piezoelektriska lösningar fördelen att de stödjer högupplösta haptiska lösningar som förstärker återkopplingen bortom enkla, monotona vibrationer. Exempelvis kan piezoelektriska styrdon producera vibrationer som varierar i frekvens och amplitud och kan användas för att beteckna olika resultat av tryckningar på en enskild knapp (figur 2).
") Figur 2: Piezoelektriska haptiska styrdon som möjliggör ett urval av vibrationer som kan användas för att indikera olika resultat av att aktivera en enda knapp. (Bildkälla: Boréas Technologies)
Figur 2: Piezoelektriska haptiska styrdon som möjliggör ett urval av vibrationer som kan användas för att indikera olika resultat av att aktivera en enda knapp. (Bildkälla: Boréas Technologies)
Sammanfattningsvis kräver haptiska återkopplingslösningar med hög upplösning:
- Bred bandbredd: för att aktivera många olika vibrationsfrekvenser och lägen
- Hög acceleration [g]: för starkare återkopplingskraft
- Stor rörelse: vilket ökar den haptiska återkopplingens känslighet
- Låg latens: snabb svarstid ökar omfånget av återkopplingen
Tabell 1 sammanfattar prestandan för var och en av de haptiska återkopplingslösningarna och demonstrerar att piezoelektriska lösningar är det enda valet för högupplösta tillämpningar eftersom de erbjuder den nödvändiga kombinationen av bandbredd, återkopplingskraft, känslighet och latens.
|
Tabell 1: Jämförelse av driftegenskaper för haptiska återkopplingslösningar. Piezoelektriska enheter erbjuder den goda acceleration (uppmätt i g där 1 g är accelerationen på grund av gravitationen vid jordytan (9,81 m/s2)), rörelse och svarstid samt anpassade vågformer som krävs för haptisk återkoppling med hög upplösning. (Bildkälla: DigiKey, via författare)
Notera att en del av den utökade drivkretskomplexiteten för piezoelektriska styrdon beror på den ytterligare funktion som krävs för att generera de anpassade vågformer som ger definition och sammanhang för den haptiska återkopplingen. ERM och LRA har inte stöd för anpassade vågformer, så drivkretsarna är enklare.
Fördelar med nya piezoelektriska haptiska återkopplingsenheter
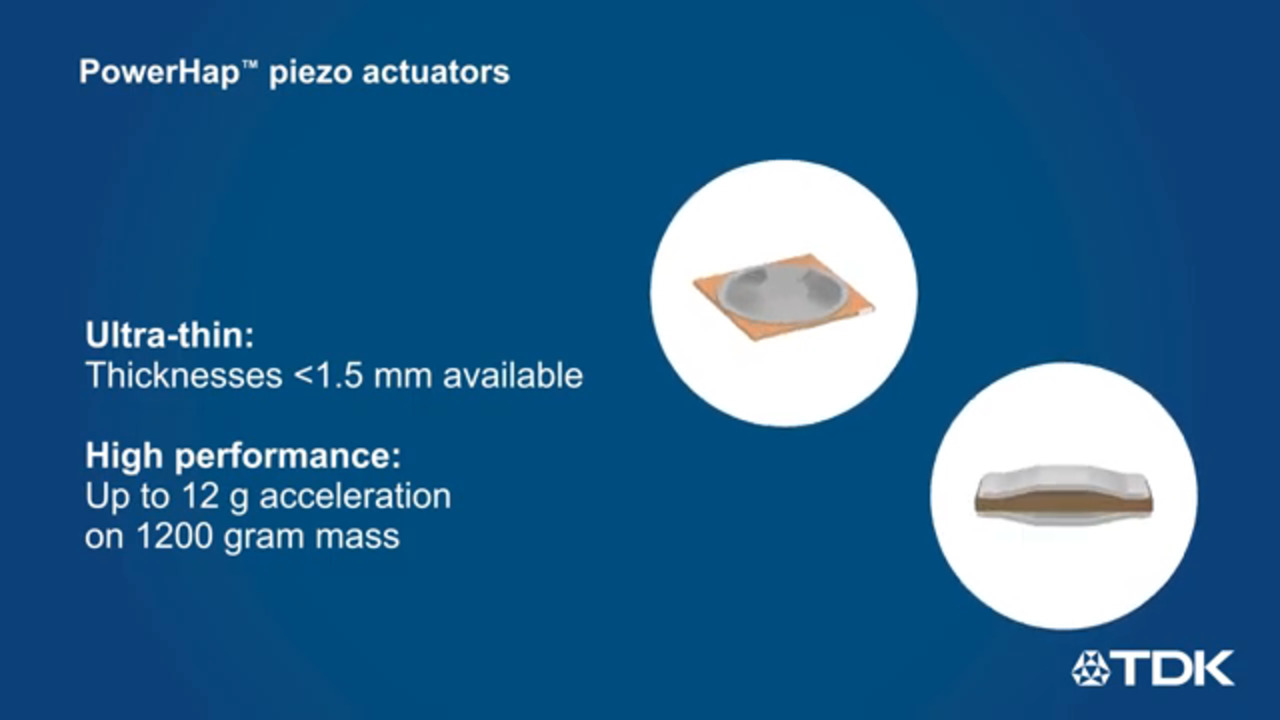
De senaste produktinnovationerna i nom både piezoelektriska styrdon och effektiva, anpassade drivkretsar har gjort teknikerna till en mycket bättre lösning för batteridrivna produkter. Till exempel finns nyligen introducerade piezoelektriska haptiska produkter, som TDK:s PowerHap B54102H1020A001 (12,7 kvadratmillimeter (mm2) i yta) och B54101H1020A001 (26 mm2), som är mindre än 2,5 mm höga och använder en flerlagerstruktur istället för det enstaka lager som används av enheter som baseras på ljudförstärkarteknik. Den här flerlagerstrukturen minskar kraven på drivkretsen i viss grad genom att sänka drivspänningen (till mellan 60 och 120 volt).
Varje lager av TDK:s flerlagerprodukt bygger endast på mycket lite i z-riktningen på grund av den omvända piezoelektriska effekten. Dock, eftersom den piezoelektriska enheten måste hålla en konstant volym dras lagren ihop samtidigt i x- och y-dimensionen.
TDK-produkten förstärker den här sammandragningen mekaniskt med ett par cymbaler i varje ände av den piezoelektriska enheten för att öka z-axelns rörelse med en faktor 15, vilket ger en rörelse på mellan 35 och 65 µm beroende på modell (figur 3). Under en belastning på 100 gram (g) (enpolig drift, sinusvåg med enkel puls, 200 Hz) uppnår det större TDK-styrdonet en acceleration på 30 g från topp till topp efter bara en 1 millisekund (ms). Frekvensområdet på 1 till 1000 hertz (Hz) gör att konstruktörerna kan skräddarsy haptiska återkopplingsprofiler med hög upplösning.
 Figur 3: TDK:s piezoelektriska haptiska styrdon använder flerlagerstruktur och cymbaler för att förstärka z-axelrörelsen. (Bildkälla: TDK)
Figur 3: TDK:s piezoelektriska haptiska styrdon använder flerlagerstruktur och cymbaler för att förstärka z-axelrörelsen. (Bildkälla: TDK)
TDK piezoelektriska haptiska styrdon kan användas i antingen enpoligt eller tvåpoligt läge. Enpolig funktion matar en positiv spänning över styrdonet medan tvåpolig funktion varierar spänningen mellan positiva och negativa toppvärden. Fördelen med tvåpolig drift är att större rörelse kan uppnås för samma spänning topp till topp eller samma förskjutning kan uppnås med en lägre spänning topp till topp. Nackdelen är att tvåpolig drift ökar de mekaniska och elektriska belastningarna på styrdonet (figur 4).
 offers the same mechanical displacement as unipolar") Figur 4: Tvåpolig drift (till höger) ger samma mekaniska rörelse som enpolig, men med lägre spänning topp till topp. (Bildkälla: TDK)
Figur 4: Tvåpolig drift (till höger) ger samma mekaniska rörelse som enpolig, men med lägre spänning topp till topp. (Bildkälla: TDK)
Kiselleverantörer har också nyligen presenterat drivkretsar som är särskilt utformade för haptiska återkopplingstillämpningar. Dessa förbättrade konstruktioner kan ge ett antal vibrationslägen i ett bra frekvensområde och erbjuder enpoliga eller tvåpoliga egenskaper, samtidigt som de arbetar med mycket högre verkningsgrad än tidigare konstruktioner. Två exempel är Boréas Technologies piezoelektriska haptiska drivkrets BOS1901CQT och Texas Instruments motordrivkrets DRV2667.
Boréas Technologies IC är en enkel piezoelektrisk styrdonsdrivkrets som innehåller energiåtervinningsteknik och kan generera flera vibrationssignaler. Kretsen kan driva styrdon med upp till 190 volttopp-topp från en matning på 3 till 5,5-volt. BOS1901 använder ett seriellt perifert gränssnitt (SPI) med hög hastighet och alla inställningar kan justeras via dess digitala front-end. Dess typiska starttid på mindre än 300 mikrosekunder (μs) innebär låg latens.
TI-kretsen är en piezoelektrisk haptisk drivkrets med en integrerad boostomvandlare på 105 volt och en digital front-end som kan driva styrdon med både hög och låg spänning. Dess digitala front-end avlastar mikroprocessorn från arbetet med att generera pulsbreddsmodulering (PWM) eller behovet av ytterligare analoga kanalkrav i värdsystemet. Kretsen inkluderar dedikerat minne för att lagra och hämta vågformer samt en avancerad vågformssyntetiserare. En typisk starttid på 2 ms begränsar latensen och det termiska överbelastningsskyddet hindrar enheten från att skadas om den överbelastas.
Piezoelektrisk haptisk systemdesign
Både Boréas och TI:s kretsar är utformade för att användas i ett beröringsaktiverat system som redan inkluderar en applikationsprocessor. Processorn utlöser körning av den haptiska återkopplingen via en SPI. Konstruktören kan även använda en analog ingång för att utlösa haptiska effekter (figur 5).
 Figur 5: Tillämpningskrets som visar motordrivkretsen TI DRV2667. Haptiska händelser utlöses av pekskärmens tillämpningsprocessor med TI-kretsen och driver sedan den piezoelektriska haptiska enheten. (Bildkälla: Texas Instruments)
Figur 5: Tillämpningskrets som visar motordrivkretsen TI DRV2667. Haptiska händelser utlöses av pekskärmens tillämpningsprocessor med TI-kretsen och driver sedan den piezoelektriska haptiska enheten. (Bildkälla: Texas Instruments)
På grund av integreringsnivån hos de senaste drivkretsarna har det blivit enklare att utforma pekskärmssystem med piezoelektrisk haptisk återkoppling, men vissa komponentval är viktiga för att optimera konstruktionens prestanda. Till exempel ska boostspänningen (BST) vara 5 volt högre än toppspänningen som piezostyrdonet utsätts för. Detta möjliggör en grad av förstärkar-overhead och ställs in med motståndsfördelarnätet R1/R2 som visas i figur 5.
Formeln för att beräkna motståndsvärdena är: V(BST) = V(FB) x (1 + R1/R2), där V(FB) = 1,32 volt.
Så för att till exempel uppnå TI-drivkretsens maximala V(BST)-kapacitet på 105 volt kan R1- och R2-värdena vara 768 respektive 9,76 kiloohm (kΩ).
Toppboostströmmen dras genom matningen via induktorn L1. Den här strömmen avgörs av R(EXT), men du måste vara noga med att välja en induktor som kan hantera den programmerade strömgränsen (ILIM). Förhållandet mellan R(EXT) och ILIM bestäms med formeln:
![]()
Där K = 10 500, VREF = 1,35 volt, RINT (drivkretsens interna motstånd) = 60 Ω, och ILIM = toppströmsgränsen för L1.
Valet av induktor är viktigt för att säkerställa bästa drivkretsprestanda. När det gäller TI-kretsen går rekommenderade induktanser från 3,3 till 22 mikrohenry (μH). Avvägningen blir att avgöra om en högre induktans ska väljas för att sänka switchningsförlusterna för boost-omvandlaren eller en mindre induktans för att maximera dess utgångsström.
De viktigaste elektriska specifikationerna för det piezoelektriska haptiska styrdonet från drivkretsperspektivet är spänning och kapacitans. Vid TI-drivkretsens maximala frekvens på 500 Hz, till exempel, är enheten optimerad att driva upp till 50 nanofarad (nF) vid 200 volttopp-till-topp (drivkretsens högsta spänningssvängningskapacitet). Kretsen kan driva större kapaciteter om den programmerade förstärkningsspänningen har sänkts och/eller användaren begränsar ingångsfrekvensen till 300 Hz, till exempel.
Ett annat viktigt komponentval är valet av förstärkningskondensator (C(BST)). Kondensatorn måste ha en spännig som är minst lika hög som laddningsspänningen eller helst högre. Till exempel rekommenderas en 100 nF-kondensator av X5R- eller X7R-typ, klassad för 250 volt när TI-kretsens maximala förstärkningsspänning på 105 volt används. C(BST) måste ha en minimal arbetskapacitans på 50 nF. För V(BST) från 30 till 80 volt är en 100 nF-kondensator klassad för 100 volt godtagbar och för V(BST) lägre än 30 volt rekommenderas en 0,22 mikrofarad-kondensator (μF) klassad för 50 volt.
Användning av en bulkkondensator (CBULK) placerad nära induktorn rekommenderas på grund av switchstiftets strömkrav. En keramisk kondensator av X5R- eller X7R-typ med kapacitans på minst 1 μF rekommenderas.
Utvecklarverktyg
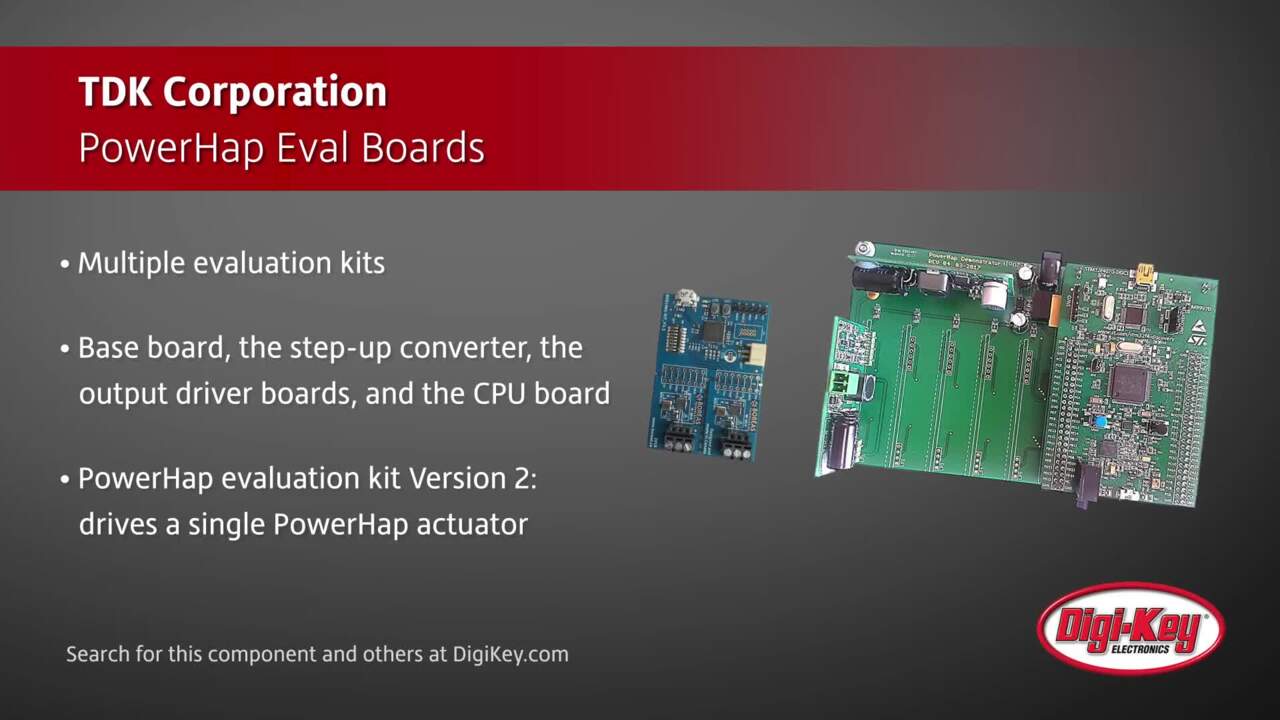
För tekniker som vill experimentera med egenskaperna hos TDK:s piezoelektriska haptiska styrdon innan de väljer hårdvara erbjuder företaget den enkanaliga PowerHap-utvärderingssatsen Z63000Z2910Z 1Z 1. Satsen innehåller ett baskort, en uppstegningsomvandlare, en utgångsdrivkrets och ett microcontrollerkort.
Satsen levereras med konfigurationsprogramvara som körs på en dator med Windows 7 (eller senare). När programvaran har lästs in ansluts satsen till datorn via en USB-kabel och drivs genom att mata 12 volt (DC). Programvaran tillhandahåller ett gränssnitt för att konfigurera det haptiska svaret från styrdonet när det trycks in. Gränssnittet tillåter konfiguration av följande signalparametrar (figur 6):
- Amplitud – 5 till 100 procent (115 volt)
- Frekvens – 20 till 300 Hz
- Vågform (trapetsvåg, sinusfyrkantvåg, sågtandsvåg)
- Trapetsarbetscykel – 35 till 75 procent
- Pulsantal – 1 till 1000
- Utlösningsnivå – 0 till 12 volt (ju lägre utlösningsnivå desto hårdare måste styrdonet tryckas in för att aktivera signalen)
- Fördröjningstid (då styrdonet inte känner av någon kraft)
 Figur 6: Programvaran för TDK PowerHap-utvärderingssatsen erbjuder ett signalkonfigurationsgränssnitt. När konfigurationen har ställts in kan den skickas till utvärderingskortets processor via knappen "Transmit configuration" (Skicka konfiguration). (Bildkälla: TDK)
Figur 6: Programvaran för TDK PowerHap-utvärderingssatsen erbjuder ett signalkonfigurationsgränssnitt. När konfigurationen har ställts in kan den skickas till utvärderingskortets processor via knappen "Transmit configuration" (Skicka konfiguration). (Bildkälla: TDK)
Programvaran gör det även möjligt för teknikern att skapa anpassade vågformer. När programvaran har konfigurerats skickas informationen till satsens processor via USB-kabeln.
En andra utvärderingssats, PowerHap Z63000Z2910Z1Z44, är särskilt utformad för tekniker som använder Boréas BOS1901CQT piezoelektriska haptiska drivkrets. Den här satsen inkluderar ett baskort, en uppstegningsomvandlare, två drivkretsar och en microcontroller. Bassatsen tillhandahålls med ett piezoelektriskt haptiskt styrdon från TDK (figur 7).
 Figur 7: TDK:s PowerHap-utvärderingssats Z63000Z2910Z1Z44 använder Boréas piezoelektriska haptiska drivkretsar och uppfyller USB-ljudprotokollet, viket förenklar konfigurationen. (Bildkälla: TDK)
Figur 7: TDK:s PowerHap-utvärderingssats Z63000Z2910Z1Z44 använder Boréas piezoelektriska haptiska drivkretsar och uppfyller USB-ljudprotokollet, viket förenklar konfigurationen. (Bildkälla: TDK)
Kortet ansluts till en dator via en USB-kabel, använder standard-USB-ljudprotokollet och tolkas som normala ljudutsignaler för alla datorer. Prototypkonstruktion av vågformer (upp till 190 volttopp-till-topp) och uppspelning kan utföras med USB-ljudprotokollet för att konstruera prototyper av haptiska effekter i programvara som MATLAB, Python och Audacity.
Slutsats
Haptisk återkoppling med piezoelektriska, ERM- och LRA-styrdon har förbättrat pekskärmsstyrningen i både konsument- och industritillämpningar. Dock har framsteg med kompakta piezoelektriska haptiska styrdon med lägre spänning nu utökat tillämpningen av högupplöst haptisk återkoppling till batteridrivna enheter.
Samtidigt har utformningen av piezoelektriska haptiska system underlättats genom införandet av specialiserade drivkretsar som kan kopplas till populära tillämpningsprocessorer och erbjuder stöd för många olika vågformer. Den stora tillgången till utvärderingssatser för dessa enheter från leverantörer som TDK möjliggör experimentering och prototypkonstruktion innan en hårdvarukonstruktion väljs.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.