Hur man snabbt implementerar GNSS-moduler för positionering med flera konstellationer
Bidraget med av DigiKeys nordamerikanska redaktörer
2021-09-09
Användningen av positionsbaserade funktioner via GNSS-mottagare med flera konstellationer för Europas Galileo, USA:s Global Positioning System (GPS), Rysslands GLONASS, Kinas satellitnavigeringssystem BeiDou och Japans QZSS ökar i en rad olika tillämpningar, inklusive robotteknik, autonoma fordon, industriell automatisering, logistik och spårning av tillgångar, drönare samt för tunga maskiner inom jordbruk och anläggning. Fördelarna med att använda GNSS-mottagare med flera konstellationer är bland annat bättre tillgänglighet till signaler för position, navigering och timing (PNT), ökad noggrannhet och integritet samt förbättrad stabilitet i tillämpningen.
Men att utveckla mottagare med flera konstellationer är en komplicerad och tidskrävande verksamhet som omfattar: optimering av L-bandets antenn, utformning av radiofrekvensens (RF) front end, integrering av algoritmer för signalbehandling av basbandet för att hämta, spåra och korrigera de olika PNT-signalerna, kodning av tillämpningens program för att extrahera PNT-data från varje kanal i basbandet och användning av denna information för att implementera systemfunktioner. Konstruktörer måste även välja en lämplig antenn och placera denna rätt.
Som ett alternativ kan konstruktörer använda sig av färdigtillverkade GNSS-moduler och utvecklingsmiljöer för att snabbt och effektivt integrera positioneringsfunktioner i ett system. GNSS-modulerna innehåller RF-front-end, basbandsbehandling och en inbäddad firmware för att skynda på utvecklingen av tillämpningens program. I vissa GNSS-moduler ingår även antennerna.
Artikeln går igenom grunderna för GNSS, PNT och användningen av GNSS-mottagare med flera konstellationer. Därefter behandlas för- och nackdelar med att integrera antenner i GNSS-moduler innan flera olika GNSS-moduler presenteras - med och utan integrerade antenner - samt tillhörande utvärderingskort från STMicroelectronics, Septentrio och Würth Elektronik som konstruktörer kan använda för att utveckla exakta och stabila positionsbaserade tillämpningar på ett effektivt och kostnadseffektivt sätt.
Vad är GNSS och PNT?
GNSS och PNT är närbesläktade begrepp. GNSS-satelliter är den vanligaste källan till PNT-signaler. GNSS-satelliter är i princip mycket exakta synkroniserade klockor som kontinuerligt sänder ut sin PNT-information. En GNSS-modul tar emot PNT-signaler från en viss satellit och beräknar sitt avstånd till den satelliten. När mottagaren känner till avståndet för minst fyra satelliter kan den uppskatta sin egen position. Positionsuppskattningens noggrannhet påverkas dock av en rad olika felkällor, inklusive:
- Klockdrift i GNSS-satelliternas tidskretsar
- Felaktigheter i förutsägelsen av GNSS-satelliters exakta omloppsposition
- Generell prestandadrift i den övergripande satellitutrustningen i förhållande till andra satelliter, även kallad satellitbias
- Förvrängningar och fördröjningar i signalöverföringen när den passerar genom jonosfären och troposfären.
- Flersignalsreflektion och varierande prestanda och drift i mottagaren
Det finns olika tekniker som konstruktörer kan använda för att korrigera satellitbaserade och atmosfäriska GNSS-fel.
Förbättring av GNSS-prestanda
Det bästa sättet att minimera effekterna av fel som härrör från GNSS-mottagaren är att använda den mottagare med bäst prestanda som passar kostnads- och storleksbegränsningarna för en viss tillämpning. Men inte ens högeffektiva mottagare är perfekta, och deras prestanda kan med stor sannolikhet förbättras. Det är viktigt att förstå dessa korrigeringsmetoder eftersom de erbjuder varierande prestanda och vissa GNSS-moduler inte kan använda dem alla.
Markbaserade referensstationer används av flera metoder för GNSS-korrigering (figur 1). De mest etablerade metoderna för att använda markbaserade referensstationer för att tillhandahålla GNSS-korrigeringar till mottagare är Real-Time Kinematic (RTK) och Precise Point Positioning (PPP). På senare tid har hybridmetoder med RTK-PPP blivit tillgängliga.
 Figur 1: En GNSS-användarmottagare kan få information om atmosfäriska fel, klockfel och omloppsfel från ett referensnätverk för att förbättra noggrannheten i positioneringen. (Bildkälla: Septentrio)
Figur 1: En GNSS-användarmottagare kan få information om atmosfäriska fel, klockfel och omloppsfel från ett referensnätverk för att förbättra noggrannheten i positioneringen. (Bildkälla: Septentrio)
RTK bygger på en enda basstation eller ett lokalt referensnätverk för korrigeringsdata som kan eliminera de flesta GNSS-felen. RTK förutsätter att basstationen och mottagaren är nära varandra - högst 40 kilometer (km) eller 25 miles från varandra - så att de upplever samma fel. Post-Processed Kinematic (PPK) är en variant av RTK och används ofta inom lantmätning och kartläggning för att få positioneringsdata med hög precision eller centimeternoggrannhet.
Det är endast fel i omloppsbanan och satellitklockan som används för att göra PPP-korrigeringar. Dessa satellitspecifika fel är oberoende av användarens plats, vilket begränsar det antal referensstationer som krävs. PPP tar dock inte hänsyn till atmosfärsrelaterade fel och har därför lägre noggrannhet än RTK. PPP-korrigeringar kan dessutom ha en initialiseringstid på cirka 20 minuter. Den längre initialiseringstiden och den lägre noggrannheten gör PPP opraktiskt i många tillämpningar.
I tillämpningar som behöver noggrannhet i närheten av RTK och snabba initialiseringstider används ofta den senaste GNSS-korrigeringstjänsten RTK-PPP (som ibland kallas state-space representation (SSR)). Den använder ett referensnätverk med stationer med ungefär 100 km mellanrum som samlar in GNSS-data och beräknar en kombination av satellitkorrigeringar och atmosfäriska korrigeringar. Referensnätverket använder Internet, satellit- och mobiltelefonnät för att skicka korrigeringsdata till abonnenterna. GNSS-mottagare som använder RTK-PPP kan ha en noggrannhet på mindre än en decimeter. Valet att använda korrigeringsmetoderna RTK, PPP och RTK-PPP innebär en rad konstruktionsmässiga avvägningar som utvecklarna måste granska för att välja den optimala lösningen för den specifika tillämpningsprofilen. (figur 2).
 Figur 2: styrkor och svagheter hos tre vanliga metoder för GNSS-korrigering. (Bildkälla: Septentrio)
Figur 2: styrkor och svagheter hos tre vanliga metoder för GNSS-korrigering. (Bildkälla: Septentrio)
Satellitbaserade förbättringssystem (SBAS) börjar bli tillgängliga på regional basis för att ersätta korrigeringsmetoderna RTK, PPP och RTK-PPP från markstationer. SBAS använder fortfarande markstationer för att mäta GNSS-fel, men stationerna är spridda över hela kontinenter. De uppmätta felen behandlas på en central plats där korrigeringarna beräknas och sänds till geosynkrona satelliter över det område som täcks. Korrigeringsdata sänds från satelliterna som en överlagring eller förbättring av de ursprungliga GNSS-uppgifterna.
GNSS-noggrannheten är beroende av tillgängligheten och noggrannheten hos satellitmätningar och tillhörande korrigeringar. Högeffektiva GNSS-mottagare spårar GNSS-signaler på flera frekvenser och använder flera GNSS-konstellationer och olika korrigeringsmetoder för att leverera den noggrannhet och resiliens som krävs. Den redundans som blir resultatet möjliggör stabila prestanda även om vissa av satellitens mätningar och data drabbas av störningar. Konstruktörer kan välja mellan en mängd olika funktioner för GNSS-noggrannhet och redundans (figur 3).
 Figur 3: Noggrannhetsklasser för GNSS med motsvarande korrigeringsmetoder och utvalda tillämpningar. (Bildkälla: Septentrio)
Figur 3: Noggrannhetsklasser för GNSS med motsvarande korrigeringsmetoder och utvalda tillämpningar. (Bildkälla: Septentrio)
GNSS-moduler: inbyggda kontra externa antenner
På grund av komplexiteten i positionering med flera konstellationer finns det moduler från olika leverantörer som skyndar på tiden till marknaden, sänker kostnaden och garanterar prestanda. Med det sagt, måste konstruktörer dock överväga om de ska använda en inbyggd antenn eller om de i stället ska välja en antenn som är placerad utanför GNSS-modulen. För tillämpningar där tid till marknaden och kostnad är en prioritet kan en inbyggd antenn vara att föredra eftersom det krävs betydligt mindre teknik. För tillämpningar som kräver FCC- eller CE-certifiering kan användningen av en modul med inbyggd antenn också skynda på godkännandeprocessen. Lösningen kan dock bli större och flexibiliteten kan vara begränsad med inbyggda antennlösningar.
Externa antenner ger konstruktörerna ett större utbud av prestanda och layoutalternativ. En stor antenn med hög prestanda eller en mindre antenn med lägre prestanda kan väljas. Antennplaceringen är dessutom mer flexibel i förhållande till GNSS-modulens placering, vilket ytterligare ökar konstruktionens flexibilitet. Flexibiliteten i placeringen gör det även möjligt att använda externa antenner för att ge en mer tillförlitlig GNSS-drift. Placeringen av antennen och anslutningsvägarna kan dock vara en komplicerad och tidskrävande process som kräver särskild expertis, vilket kan öka kostnaderna och fördröja marknadsintroduktionen.
En liten GNSS-modul för konstruktioner med begränsat utrymme
Konstruktionsteam som har den expertis som krävs för antennplacering och förläggning kan använda GNSS-modulen Teseo-LIV3F med flera konstellationer (GPS/Galileo/GLONASS/BeiDou/QZSS) från STMicroelectronics, som använder en extern antenn (figur 4). Modulen levereras i en LCC-18 kapsling med måtten 9,7 x 10,1 mm och har en positioneringsnoggrannhet på 1,5 m med CEP (Circular Error Probable), och en tid till första fixering (TTFF) vid kall- och varmstart under 32 s respektive under 1,5 sekund (GPS, GLONASS). Den har en energiförbrukning i standby-läge på 17 µW och en energiförbrukning vid spårning på 75 mW.
 Figur 4: GNSS-modulen Tesco-LIV3F innehåller GNSS-kärnan och delsystemen samt all nödvändig hantering av anslutningar och strömförsörjning i en kapsling som med måtten 9,7 x 10,1 mm. Den kräver en extern antenn. (Bildkälla, STMicroelectronics)
Figur 4: GNSS-modulen Tesco-LIV3F innehåller GNSS-kärnan och delsystemen samt all nödvändig hantering av anslutningar och strömförsörjning i en kapsling som med måtten 9,7 x 10,1 mm. Den kräver en extern antenn. (Bildkälla, STMicroelectronics)
Den inbyggda 26 MHz temperaturkompenserade kristalloscillatorn (TCXO) i Tesco-LIV3F bidrar till att säkerställa en hög noggrannhet, och den dedikerade 32 kHz oscillatorn för realtidsklockan (RTC) möjliggör en kortare tid till första fixering (TTFF). Funktioner som dataloggning, sju dagars autonom assisterad GNSS, omprogrammerbar firmware, likväl som firmware-uppgraderingar möjliggörs av det inbyggda flashminnet på 16 Mbit.
Tesco-LIV3F är lämpad för tillämpningar såsom försäkringar, logistik, drönare, vägtullar, stöldskyddssystem, lokalisering av människor och husdjur, fordonsspårning och nödsamtal.
Som en förcertifierad lösning kan användningen av modulen Teseo-LIV3F resultera i en kortare tid till marknaden för den slutliga tillämpningen. Den har ett drifttemperaturområde på -40 °C till +85 °C.
För att experimentera med modulen och skynda på utvecklingen av tillämpningen kan konstruktörer använda utvärderingskortet AEK-COM-GNSST31. Vid användning tillsammans med firmware X-CUBE-GNSS1, har utvärderingspaketet stöd för hämtning, spårning, navigering och datautmatning utan något externt minne. Utvärderingskortet är även utformat för användning med en SPC5-mikrokontroller för utveckling av fordonstillämpningar.
GNSS-modul med störningsdämpning
GNSS-mottagaren 410322 mosaic-X5 med flera konstellationer från Septentrios är en energisnål, ytmonterad modul med måtten 31 x 31 x 4 mm som ger konstruktörer en mängd gränssnitt, inklusive fyra UART:ar, Ethernet, USB, SDIO och två användarprogrammerbara GPIO:ar.
Mosaic-X5 är utformad för användning inom robotteknik, autonoma system och andra massmarknadstillämpningar och har en uppdateringshastighet på 100 Hz, en latenstid på under 10 ms och en vertikal och horisontell RTK-positioneringsnoggrannhet på 0,6 cm respektive 1 cm. Den kan spåra alla GNSS-konstellationer, stöder aktuella och framtida signaler och är kompatibel med PPP-, SSR-, RTK- och SBAS-korrigeringar. Modulens TTFF är under 45 s vid kallstart och under 20 s vid varmstart.
Mosaic-X5 innehåller flera patenterade tekniker från Septentrio, bland annat AIM+, en inbyggd teknik för att dämpa störningar som undertrycker en mängd olika störningskällor, från enkla kontinuerliga smalbandiga signaler till komplicerade bredbandiga och pulsade störningssändare.
Modulernas gränssnitt, kommandon och datameddelanden är fullständigt dokumenterade. Det medföljande programmet RxTools gör det möjligt att konfigurera och övervaka mottagaren samt logga och analysera data.
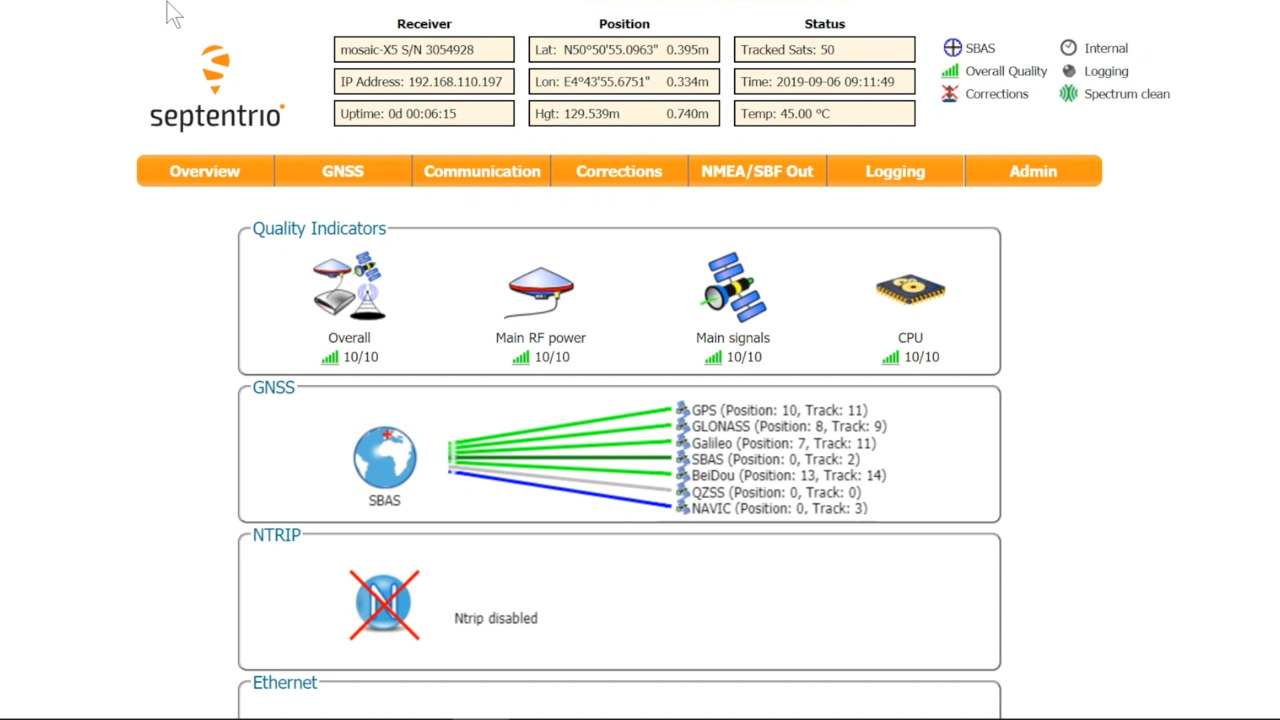
Utvecklingssatsen 410331P3161 mosaic-X5 från Septentrio gör det möjligt för konstruktörer att utforska, utvärdera och utveckla prototyper som drar full nytta av kapaciteten i mosaic-X5 (figur 5).
 Figur 5: Konstruktörer kan skapa en prototyp med hjälp av utvecklingssatsen 410331P3161 mosaic-X5 genom att använda en mängd olika anslutningar, inklusive Ethernet, COM-portar och USB 2.0, eller genom att använda ett SD-minneskort. (Bildkälla: Septentrio)
Figur 5: Konstruktörer kan skapa en prototyp med hjälp av utvecklingssatsen 410331P3161 mosaic-X5 genom att använda en mängd olika anslutningar, inklusive Ethernet, COM-portar och USB 2.0, eller genom att använda ett SD-minneskort. (Bildkälla: Septentrio)
Satsen använder det intuitiva webbgränssnittet i mosaic-X5 för enkel drift och övervakning, vilket gör det möjligt för konstruktörer att styra mottagarmodulen från valfri mobil enhet eller dator. Webbgränssnittet använder lättlästa kvalitetsindikatorer för att övervaka mottagarens funktion.
Konstruktörer kan skapa en prototyp genom att integrera mosaics utvecklingssats med hjälp av någon av följande anslutningar: Ethernet, COM-portar, USB 2.0 och SD-minneskort.
GNSS-modul med inbyggd antenn
För konstruktörer av tillämpningar som kan ha nytta av en GNSS-modul med inbyggd antenn erbjuder Würth Elektronik modulen 2614011037000 Erinome-I med en högeffektiv systemkrets (SoC) (figur 6). Modulen har stöd för GNSS-konstellationerna GPS, GLONASS, Galileo och BeiDou och har en inbyggd antenn som förenklar hårdvaruintegrationen och förkortar tiden till marknaden. Modulen, inklusive den inbyggda antennen, har måtten 18 x 18 mm.
 Figur 6: 2614011037000 Erinome-I är en komplett GNSS-modul med en högeffektiv GNSS-systemkrets och en inbyggd antenn. (Bildkälla: Würth Elektronik)
Figur 6: 2614011037000 Erinome-I är en komplett GNSS-modul med en högeffektiv GNSS-systemkrets och en inbyggd antenn. (Bildkälla: Würth Elektronik)
I modulen ingår även TCXO, RF-filter, en förstärkare med lågt brus (LNA) och ett seriellt flashminne.
Würth erbjuder även utvärderingskortet 2614019037001 (EVB) för Erinome-I (figur 7). EVB kan även fungera som referenskonstruktion för integrering av GNSS-modulen i en tillämpning. En USB-port kan användas för att ansluta EVB till en dator. En flerstiftskontakt ger konstruktörerna tillgång till alla stift i GNSS-modulen.
 Figur 7: Utvärderingskortet 2614019037001 för Erinome-I (nära mitten av kortet, med den inbyggda antennen synlig i mitten av modulen) fungerar även som referensdesign. (Bildkälla: Würth Elektronik)
Figur 7: Utvärderingskortet 2614019037001 för Erinome-I (nära mitten av kortet, med den inbyggda antennen synlig i mitten av modulen) fungerar även som referensdesign. (Bildkälla: Würth Elektronik)
Würth Elektronik Navigation and Satellite Software (WENSS) är ett enkelt PC-verktyg för att interagera med GNSS-modulen Erinome-I via UART-gränssnittet. Den har stöd för:
- Styrning av utvärderingskortets drift
- Dubbelriktad kommunikation med modulen Erinome-I
- Utvärdering av funktioner och möjligheter i Erinome-I
- Kännedom om protokoll, meningar och kommandon för Erinome-I
- Konfiguration av Erinome-I utan kunskap om protokollen
- Tolkning av meningar och kommandon som används av Erinome-I
WENSS gör det enkelt att utvärdera positioneringstillämpningar utan avancerade kunskaper. Erfarna utvecklare kan även använda WENSS för mer avancerade konfigurationer.
Sammanfattning
Noggrann och tillförlitlig positionering uppnås bäst genom att använda flera konstellationer med tillhörande korrigeringsteknik. Det är komplicerade system, men konstruktörer kan använda sig av färdigtillverkade GNSS-moduler, tillhörande utvecklingssatser och -miljöer för att snabbt och effektivt jämföra alternativ och implementera positionsbaserade funktioner och tjänster.
Rekommenderad läsning
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.