Hur man anpassar drivkretsar för solenoider och stegmotorer för industriella tillämpningar
Bidraget med av DigiKeys nordamerikanska redaktörer
2024-02-07
Tillämpningar för enheter i molnkanten (Edge devices), som t.ex. styrsystem för fabriksgolvet och fordons- och laboratorieutrustning, använder i allt högre grad IoT (Internet of Things) och AI (artificiell intelligens) för beslutsfattande med låg latens, högre verkningsgrad, lägre kostnader samt ökad säkerhet och produktivitet. Drivkretsar för solenoider och stegmotorer behöver utvecklas för att införliva mer inbyggd avkänning och intelligens för att underlätta integrationen i denna snabbt föränderliga miljö, och för att ytterligare förbättra precision, tillförlitlighet, styrningar av slutna slingor, kostnad, storlek och användarvänlighet.
Artikeln sammanfattar de grundläggande funktionerna hos solenoider och stegmotorer och beskriver fördelarna med drivkretsar som är utformade för intelligenta enheter i molnkanten. Därefter ges en introduktion och förklaring till hur man kan börja konstruera med exempel på drivkretsar från Analog Devices.
Solenoider och stegmotorer: lika men ändå olika
Solenoider och stegmotorer omvandlar elektrisk ström till fysisk rörelse via en lindad spole som fungerar som en elektromagnet. Trots skillnaderna i utseende och funktion gör spolens gemensamma egenskaper att samma drivkrets, under vissa omständigheter, kan användas för båda enheterna.
Solenoider är relativt enkla komponenter som utför en linjär mekanisk rörelse med tillförd ström. De består av en elektrisk spole som är lindad runt ett cylindriskt rör med ett ferromagnetiskt ställdon, även kallad för kolv, i den ihåliga kärnan, där kolven är fri att röra sig inom spolens kropp (figur 1, vänster).
I stegmotorer används däremot flera statorspolar som är placerade runtom motorhusets omkrets (figur 1, höger). Motorn har också en uppsättning permanenta magneter som är fästa vid rotorn.
") Figur 1: Solenoidens konstruktion består av en lindad spole med en intern kolv (vänster). Stegmotorer är mer komplicerade med permanenta magneter på rotorn och elektromagnetiska spolar placerade på statorn (höger). (Bildkällor: Analog Devices, Monolithic Power Systems)
Figur 1: Solenoidens konstruktion består av en lindad spole med en intern kolv (vänster). Stegmotorer är mer komplicerade med permanenta magneter på rotorn och elektromagnetiska spolar placerade på statorn (höger). (Bildkällor: Analog Devices, Monolithic Power Systems)
För solenoider utgörs kolvens rörelse av en enda "stöt" som uppstår när ström tillförs och kolven förflyttas till sitt yttersta läge. När strömmen bryts använder de flesta solenoider en fjäder för att återföra kolven till sitt nominella viloläge.
I den mest grundläggande drivmetoden styrs solenoiden av en strömimpuls för på/av. Det är enkelt och direkt, men nackdelarna är hög stötkraft, vibrationer, oljud och elektriska störningar, dålig elektrisk verkningsgrad och liten kontroll över kolvens rörelse respektive återgång.
Stegmotorns rotation sker när statorspolarna aktiveras i ordninsföljd och det roterande magnetfältet som uppstår drar i armaturens magneter. Genom att styra ordningsföljden kan stegmotorns rotor fås att rotera kontinuerligt, stanna eller byta riktning.
Till skillnad från solenoiden, som inte har några tidsfaktorer, måste statorspolarna bland annat aktiveras i rätt ordningsföljd och med rätt pulsbredd.
Smarta drivkretsar hanterar begränsningarna och förbättrar effektiviteten
Genom att noggrant kontrollera den ström som driver spolarna i solenoider och stegmotorer, inklusive vågformens utseende, stig- och falltider och andra parametrar, kan en intelligent drivkrets ha många fördelar, bland annat:
- Förbättrad jämnhet i rörelse och rotation och minimalt med hackande
- Minskade vibrationer och stötar, särskilt för solenoider
- Mer exakt positionering för stegmotorns start-/stopp-/backrörelse
- Konsekvent prestanda och anpassning till transienta eller varierande belastningar
- Förbättrad verkningsgrad
- Mindre fysiskt slitage
- Lägre oljud och elektriska störningar
- Enkelt gränssnitt mot en styrande processor, vilket är viktigt för IoT-installationer
MAX22200 från Analog Devices är en integrerad, seriellt styrd drivkrets för solenoider och motorer, och visar vad en sofistikerad drivkrets kan göra för solenoider (figur 2). De åtta drivkretsarna med halvbrygga på 1 A i denna krets på 36 V kan parallellkopplas för att dubbla drivströmmen, eller konfigureras som helbryggor för att driva upp till fyra låsande ventiler (även kallade bistabila ventiler).
") Figur 2: MAX22200 från Analog Devices är en integrerad, seriellt styrd magnet- och motorstyrenhet med åtta drivkretsar med halvbryggor som kan ordnas i olika konfigurationer. (Bildkälla: Analog Devices)
Figur 2: MAX22200 från Analog Devices är en integrerad, seriellt styrd magnet- och motorstyrenhet med åtta drivkretsar med halvbryggor som kan ordnas i olika konfigurationer. (Bildkälla: Analog Devices)
Drivkretsen stödjer två styrmetoder: VDR (Voltage Drive Regulation) och CDR (Current Drive Regulation). Med VDR matar enheten ut en pulsbreddsmodulerad (PWM) spänning där arbetscykeln programmeras med hjälp av dess SPI-gränssnitt. Utströmmen är proportionerlig mot den programmerade arbetscykeln för en given matningsspänning och solenoidresistor. CDR är en form av styrning med sluten slinga där en integrerad, strömavkännande krets utan förluster känner av utströmmen och jämför den med en programmerbar, intern, referensström.
Till skillnad från en enkel drivkrets med strömkälla kan MAX22200 skräddarsy strömmatningens profil. För att optimera effekthanteringen i tillämpningar med drivning av solenoider kan excitationsnivån för drivningen (IHIT), hållningens drivningsnivå (IHOLD) och excitationstiden för drivningen (tHIT) konfigureras individuellt för respektive kanal. Den har även flera funktioner relaterade till skydd och fel, som t.ex.:
- Överströmsskydd (OCP)
- Detektering av öppen last (OL)
- Termisk avstängning (OTSD)
- Underspänningsskydd (UVLO)
- Verifiering för detektering av kolvens rörelse (DPM)
De fyra första funktionerna kommer som standard och är välkända. DPM kräver ytterligare förklaringar. Till exempel, om ventilen fungerar korrekt när solenoiden aktiveras i en solenoidstyrd ventil, är strömprofilen inte monoton (figur 3, svart kurva). Istället visar den en sänkning som beror på den motelektromotoriska kraften (BEMF) som genereras av kolvens rörelse (figur 3, blå kurva).
 Figur 3: När MAX22200 driver en solenoid kan den upptäcka om en solenoid eller ventil har fastnat genom att leta efter den förväntade BEMF-drivna strömsänkningen mot gränsvärdet (IDPM_TH) när solenoiden drivs från startströmmen (ISTART) till den slutliga styrnivån för excitation (IHIT). (Bildkälla: Analog Devices)
Figur 3: När MAX22200 driver en solenoid kan den upptäcka om en solenoid eller ventil har fastnat genom att leta efter den förväntade BEMF-drivna strömsänkningen mot gränsvärdet (IDPM_TH) när solenoiden drivs från startströmmen (ISTART) till den slutliga styrnivån för excitation (IHIT). (Bildkälla: Analog Devices)
När DPM-funktionen i MAX22200 konfigureras och används för solenoider detekterar den förekomsten av BEMF-sänkningen under exciteringsfasen. Om sänkningen inte upptäcks aktiveras FAULT-stiftet och en markering sker i det interna felregistret.
Utvärderingssatser underlättar processen
För att lösa problem relaterade till systemets prestanda vid olika statiska och dynamiska krav och belastningsförhållanden, erbjuder Analog Devices utvärderingskortet MAX22200EVKIT#, för utvärdering av strömhantering av solenoidstyrning med MAX22200 (figur 4). Utvärderingssatsen möjliggör seriell styrning av MAX22200 och felövervakning med ett inbyggt USB- till SPI-gränssnitt via microcontrollern MAX32625. Den innehåller ett Windows-kompatibelt grafiskt användargränssnitt som gör det möjligt att använda funktionerna i kretsen MAX22200, vilket gör den till ett komplett PC-baserat utvärderingssystem.
 Figur 4: Utvärderingskortet MAX22200EVKIT# för strömhantering av solenoidstyrning för MAX22200 möjliggör fullständig användning av den integrerade kretsen och dess belastning med hjälp av ett Windows-baserat gränssnitt. (Bildkälla: Analog Devices)
Figur 4: Utvärderingskortet MAX22200EVKIT# för strömhantering av solenoidstyrning för MAX22200 möjliggör fullständig användning av den integrerade kretsen och dess belastning med hjälp av ett Windows-baserat gränssnitt. (Bildkälla: Analog Devices)
Detta färdigmonterade och testade kort kan konfigureras som en solenoid för primär-/sekundärsidan, och för låsande ventiler (som ofta drivs av solenoider) eller likströmsmotorer med borstar.
Stegmotorer: fler frihetsgrader att styra
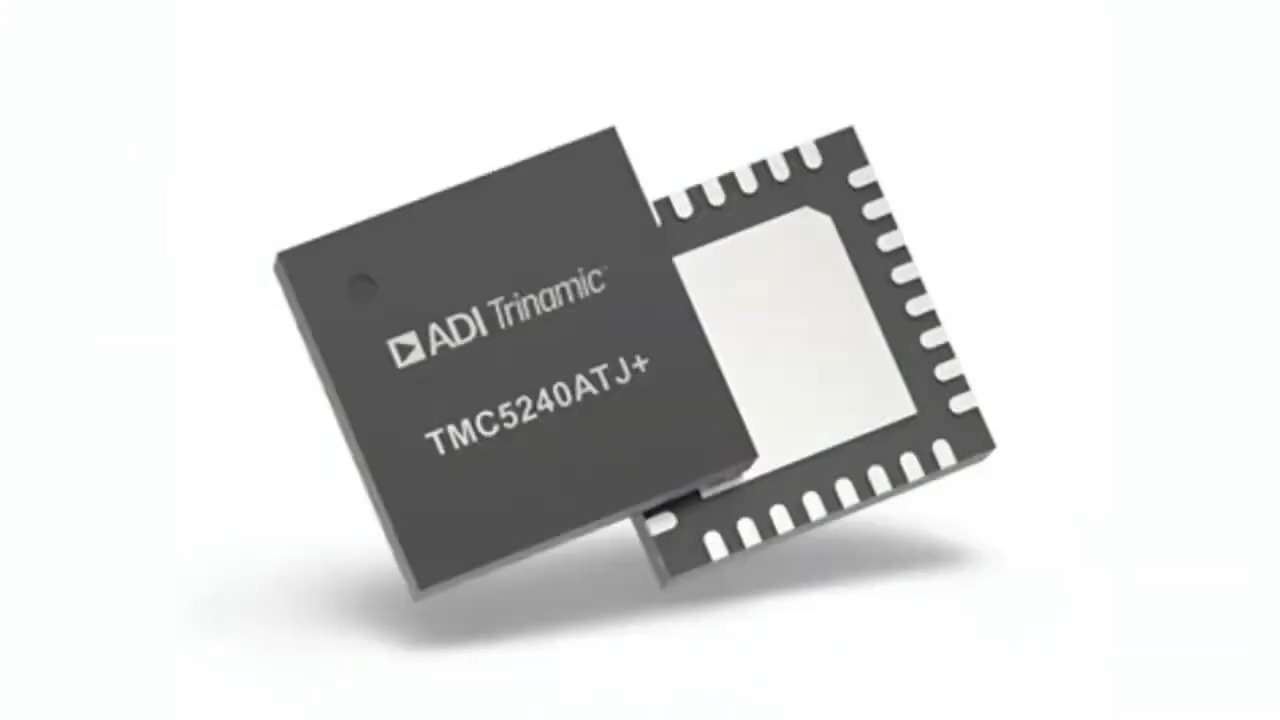
Stegmotorer är mer komplicerade än solenoider och ställer högre krav på styrningen. Detta framgår av egenskaperna hos TMC5240 från Analog Devices (figur 5), en integrerad, högeffektiv styrenhet för stegmotorer och drivkretsar med seriella kommunikationsgränssnitt (SPI, UART), omfattande diagnostikfunktioner och inbäddade algoritmer.
") Figur 5: Den högeffektiva styrenheten TMC5240 för stegmotorer och drivkretsar innehåller sofistikerade algoritmer för att ge optimal prestanda för solenoider och stegmotorer. (Bildkälla: Analog Devices)
Figur 5: Den högeffektiva styrenheten TMC5240 för stegmotorer och drivkretsar innehåller sofistikerade algoritmer för att ge optimal prestanda för solenoider och stegmotorer. (Bildkälla: Analog Devices)
Kretsen krets kombinerar en flexibel rampgenerator med åtta punkter för minimal ryckighet vid automatisk målpositionering. Ryckning är accelerationens förändringshastighet och överdriven ryckighet kan orsaka många systemfel och prestandarelaterade problem. Stegmotorns styrning har integrerade H-bryggor på 36 V, 3 A, med en på-resistans på 0,23 Ω och integrerad strömavkänning (ICS) utan avledning. TMC5240 finns i en liten TQFN32-kapsling med måtten 5 × 5 mm och en termiskt optimerad TSSOP38-kapsling med måtten 9,7 × 4,4 mm och med en exponerad lödpunkt.
TMC5240 har unika och avancerade funktioner som ger förbättrad precision, hög energieffektivitet, hög tillförlitlighet, mjuk rörelse och sval drift. Dessa funktioner omfattar bl.a:
- StealthChop2: En störningsfri chopper-algoritm med hög precision för tyst rörelse och inbromsning av motor, vilket möjliggör snabbare acceleration och inbromsning av motorn än den enklare StealthChop-algoritmen
- SpreadCycle: Strömstyrning cykel-för-cykel med hög precision för de största dynamiska rörelserna
- StallGuard2: Tillhandahåller sensorlös detektering av motorhinder och mätning av mekanisk belastning för SpreadCycle
- StallGuard4: Erbjuder sensorlös detektering av motorhinder och mätning av mekanisk belastning för StealthChop
- CoolStep: Använder mätningar från StallGuard för att anpassa motorströmmen för bästa verkningsgrad och lägsta uppvärmning av motor och drivkrets
Funktionerna kan ställas in i förväg och aktiveras under motorns driftcykel. Dessutom kan vridmomentet styras i kombination med accelerationen för att utveckla det önskade värdet och samtidigt ge effektiv och mjuk acceleration och inbromsning.
Till exempel kan en uppsättning av tre accelerations- och inbromsningssegment användas på två sätt: för anpassning av motorns vridmomentkurva genom att använda högre accelerationsvärden vid en lägre hastighet, eller för att minska ryckigheten vid övergången från ett accelerationssegment till nästa. För att hantera detta gör genereringen av rörelseprofilen med åtta punkter i TMC5240 det möjligt för styrenheten att bibehålla ett segment med konstant hastighet medan den önskade målpositionen ändras i realtid, vilket resulterar i lägesförflyttningar utan ojämnheter (figur 6).
") Figur 6: TMC5240 har åtta punkters stig- och falltid som stödjer en snabb förändring av målpositionen, vilket resulterar i lägesöverföringar utan ojämnheter. (Bildkälla: Analog Devices)
Figur 6: TMC5240 har åtta punkters stig- och falltid som stödjer en snabb förändring av målpositionen, vilket resulterar i lägesöverföringar utan ojämnheter. (Bildkälla: Analog Devices)
Med tanke på drivkretsens flexibilitet, mångsidighet och komplexitet är utvärderingskortet TMC5240-EVAL ett välkommet tillbehör (figur 7). Den använder standardschemat för kretsen och har flera alternativ i sin programvara, så att konstruktörer kan testa olika driftlägen.
 Figur 7: Med utvärderingskortet TMC5240-EVAL och tillhörande grafiskt användargränssnitt kan konstruktörer undersöka och anpassa prestandan hos TMC5240 till sin specifika kombination av enheter och belastning. (Bildkälla: Analog Devices)
Figur 7: Med utvärderingskortet TMC5240-EVAL och tillhörande grafiskt användargränssnitt kan konstruktörer undersöka och anpassa prestandan hos TMC5240 till sin specifika kombination av enheter och belastning. (Bildkälla: Analog Devices)
För konstruktörer med mindre avancerade utvärderings- och konstruktionsbehov finns även TMC5240-BOB från Analog Devices. Detta grundläggande kopplingskort för integrerade kretsar leder ut de fysiska stiftanslutningarna på TMC5240 till användaråtkomliga stiftrader.
Sammanfattning
Genom att tillföra intelligens till drivkretsar för solenoider och stegmotorer får man bättre styrning och feldetektering, kan fatta beslut i realtid och kommunicera med överordnade styrsystem eller AI-baserade produktionssystem. Högintegrerade drivkretsar, som t.ex. MAX22200 och TMC5240 från Analog Devices, gör att användare snabbt kan komma igång med avancerade algoritmer för att optimera prestandan för solenoider och stegmotorer i sin tillämpning.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.