Använda Bluetooth 5.1-kompatibla plattformar för precis tillgångsspårning och inomhuspositionering – del 1
Bidraget med av DigiKeys nordamerikanska redaktörer
2019-07-25
Redaktörens anmärkning: Del 1 i den här serien i två delar beskriver funktionerna i Bluetooth 5.1 positionering, ett tillägg till den fasta Bluetooth lågenergiprogramvaran som gör det möjligt för konstruktörerna att utveckla Aoa- (Angle of Arrival) och AoD-baserade (Angle of Departure) positioneringstillämpningar som tillgångsspårning och inomhuspositionssystem (IPS). Den introducerar sedan lämpliga plattformar som de nya funktionerna sedan kan köras på. Del 2 visar hur Bluetooth 5.1-positioneringsbaserade tillämpningar kan utvecklas och beskriver hur du kommer igång med dessa plattformar.
Efterfrågan på lokaliseringstjänster växer i takt med att logistikföretagen försöker förbättra leveranskedjans effektivitet genom att spåra tillgångar i realtid samt produktivitetsförbättringar av affärsmålen genom att övervaka personal- och kundrörelser. Trots att Bluetooths indikator för mottagen signalstyrka (RSSI) kan användas för att beräkna avståndet från en känd fast punkt är tekniken inte precis nog för tillämpningar som inomhuspositionssystem (IPS) och tillgångsspårning. En uppdatering av Bluetooth-specifikationen erbjuder dock en mer precis väg framåt.
Mer specifikt har den senaste versionen av Bluetooth Core Specification (v5.1) (marknadsförs som "Bluetooth 5.1 Direction Finding") lagt till riktningsfunktionerna Angle of Arrival (AoA) och Angle of Departure (AoD) vilket gör det mycket lättare för utvecklarna att avgöra en Bluetooth-sändares position i två eller tre dimensioner med precision.
Den här artikeln, som är den första av två delar, beskriver AoA och AoD samt förklarar hur förbättringarna av Bluetooth Core Specification gör det enklare att implementera teknikerna. Därefter introducerar den lämpliga plattformar som positioneringstillämpningar kan implementeras på.
RF-riktningsidentifieringstekniker
Riktningsidentifiering med radiofrekvens (RF) baserad på RSSI ger avståndsbedömningar baserat på signalstyrka. Högre precision kan uppnås genom att göra flera avståndsmätningar från olika punkter. En huvudfördel med RSSI är att det endast kräver en antenn per enhet – vilket eliminerar komplexiteten, kostnaden och storleken som antennmatriser medför. Nackdelen är bristande precision i och med att tekniken ger en precision på 3 till 5 meter (m).
En annan vanlig riktningsidentifieringsteknik kallas Time of Arrival (ToA), vilket är tiden det tar för en radiosignal att sändas från en enskild sändare till en enskild fjärrmottagare. Den här metoden kräver endast en antenn per enhet, men nackdelen är kravet att varje enhet måste ha en synkroniserad klocka med hög precision. Positionsprecisionen för ToA-system kan vara närmare 1 m.
I och med lanseringen av Bluetooth 5.1-specifikationen valde Bluetooth Special Interest Group (SIG) att stödja en tredje riktningsidentifieringsteknik som baseras på AoA och AoD.
Med AoA spårar en mottagande enhet ankomstvinklar för enskilda föremål medan den mottagande enheten med AoD beräknar sin egen position i rummet med vinklar utifrån flera fyrar och deras positioner (figur 1).
 and AoD method (right)") Figur 1: I AoA-metoden för riktningsidentifiering (vänster) sänder (TX) tillgångarna sin position till en AoA-lokaliserare som mäter signalens ankomstvinkel. Med AoD-metoden (höger) sänder fyrar AoD-information medan en mobil enhet tar emot (RX) fyrsignalerna och beräknar positionen. I varje fall är det den mottagande enheten som kräver beräkningskraften för att beräkna sändarens riktning. (Bildkälla: Silicon Labs)
Figur 1: I AoA-metoden för riktningsidentifiering (vänster) sänder (TX) tillgångarna sin position till en AoA-lokaliserare som mäter signalens ankomstvinkel. Med AoD-metoden (höger) sänder fyrar AoD-information medan en mobil enhet tar emot (RX) fyrsignalerna och beräknar positionen. I varje fall är det den mottagande enheten som kräver beräkningskraften för att beräkna sändarens riktning. (Bildkälla: Silicon Labs)
Beslutet att inkludera en riktningsidentifieringsfunktion i Bluetooth 5.1 fattades delvis på grund av inverkan från några driftiga företag som redan erbjuder egna AoA- och AoD-lösningar för Bluetooth Low Energy-produkter (BLE). Bluetooth 5.1 gör det enklare för utvecklare att utnyttja RF-riktningsidentifiering genom att inkludera en uppdatering av kärnspecifikationen för att göra det lättare att extrahera IQ-signaldata (i fas- och kvadraturfasinformation) från BLE-paket. Detta gör idet i sin tur enklare för utvecklare att implementera positionsservicetillämpningar.
Till exempel är AoA-metoden lämplig för att spåra en sändande BLE-sändtagare. Med hjälp av en enskild antenn skickar sändtagaren paket som är aktiverade för riktningsidentifiering och som tas emot av en "positionerare" med flera antenner. Positioneraren tar prov på IQ-data från signalpaketen och switchar mellan varje aktiv antenn i matrisen. Genom att göra detta känner den igen fasskillnaden för signalen på grund av skillnaden i avstånd från varje antenn i matrisen till den enskilda sändande antennen. Positioneringsmotorn använder sedan fasskillnadsinformationen för att avgöra vinkeln från vilken signalerna togs emot och därigenom sändarens riktning (figur 2).
 Figur 2: En radiosignals ankomstvinkel kan beräknas om signalfasen (θ) vid varje antenn, våglängden (λ) och avståndet (d) mellan intilliggande antenner är känt. (Bildkälla: Bluetooth SIG)
Figur 2: En radiosignals ankomstvinkel kan beräknas om signalfasen (θ) vid varje antenn, våglängden (λ) och avståndet (d) mellan intilliggande antenner är känt. (Bildkälla: Bluetooth SIG)
Att kombinera den beräknade signalriktningen från två eller fler positionerare gör det möjligt att lokalisera en sändare (figur 3).
 Figur 3: Genom at beräkna AoA för signaler vid två fasta positionerare kan positionen för en sändande tillgång beräknas i tre dimensioner. Om de absoluta koordinaterna för positionerarna är kända kan även de absoluta koordinaterna för den sändande tillgången beräknas. (Bildkälla: Silicon Labs)
Figur 3: Genom at beräkna AoA för signaler vid två fasta positionerare kan positionen för en sändande tillgång beräknas i tre dimensioner. Om de absoluta koordinaterna för positionerarna är kända kan även de absoluta koordinaterna för den sändande tillgången beräknas. (Bildkälla: Silicon Labs)
Situationen är omvänd för AoD-metoden. I det här scenariot skickar enheten med antennmatrisen en signal via var och en av antennerna. När varje signalpaket från antennerna i matrisen anländer till mottagarens enskilda antenn fasskiftas den från föregående signal på grund av det annorlunda avstånd den har rört sig från sändaren (figur 4).
 Figur 4: Med AoD-metoden: När varje signalpaket från antennerna i matrisen anländer till mottagarens enskilda antenn fasskiftas den från föregående signal på grund av det annorlunda avstånd den har rört sig från sändaren. (Bildkälla: Bluetooth SIG)
Figur 4: Med AoD-metoden: När varje signalpaket från antennerna i matrisen anländer till mottagarens enskilda antenn fasskiftas den från föregående signal på grund av det annorlunda avstånd den har rört sig från sändaren. (Bildkälla: Bluetooth SIG)
Den mottagande enhetens antenn tar IQ-prov från signalpaketen och vidarebefordrar dem till positioneringsmotorn, som sedan använder dessa data för att avgöra vinkeln från vilken signalerna togs emot och därigenom sändarens riktning. Det här systemet passar för tillämpningar som inomhusnavigation där sändaren är en fast referenspunkt och mottagaren är, till exempel, en konsumentsmartphone.
Uppdateringar i Bluetooth 5.1
Bluetooth 5.1 kräver förändringar av RF-programvaruprotokollet (eller stack), och, beroende på chiptillverkare, vissa maskinvaruförbättringar (radio). För det första lägger det reviderade protokollet till en kontinuerlig tonförlängning (CTE) till alla Bluetooth-paket som används för riktningsidentifiering. (Paketen är i övrigt omodifierade, så det går att använda för standard-BLE-kommunikation.)
CTE är en ren (dvs. omodulerad) ton som skickas på Bluetooth-bärfrekvensen plus 250 kilohertz (kHz) (eller ibland plus 500 kHz när BLE:s högre genomströmningsläge används) i mellan 16 och 160 mikrosekunder (µs). Tonen består av en sekvens utan vitt brus på 1 s som sänds tillräckligt länge nog för att mottagaren ska extrahera IQ-data utan de störande moduleringseffekterna. Eftersom CTE-signalen sänds sist påverkas inte paketets cykliska redundanskontroll (CRC).
Det andra betydande tillägget till specifikationen gör det mycket enklare för utvecklaren att konfigurera protokollet för att utföra IQ-provtagningen. Den här konfigurationen inkluderar att ställa in både provtagningstid och antennswitchning, vilka är kritiska för precisionen i positionsbedömningen.
Medan olika konfigurationer av IQ-provtagningstid kan användas tas normalt en IQ-sampling per 1 eller 2 µs under referensperioden för varje antenn och resultaten registreras i BLE SoC:s RAM-minne. Hur fasen hos den mottagna signalen varierar när den provtas av olika antenner i matrisen visas (figur 5).[1]
 Figur 5: En signal från en enskild sändare uppvisar en annan fas vid ankomsten hos antenner som har olika avstånd till källan. (Bildkälla: Bluetooth SIG)
Figur 5: En signal från en enskild sändare uppvisar en annan fas vid ankomsten hos antenner som har olika avstånd till källan. (Bildkälla: Bluetooth SIG)
Att registrera IQ-samplingarna är bara det första steget i att bygga en lokaliseringstillämpning. För att slutföra uppgiften måste utvecklarna utforma eller välja de optimala antennmatriserna för positionerarna och fyrarna som används i tillämpningen och bekanta sig med de komplexa algoritmer som krävs för att utföra riktningsidentifieringsberäkningarna.
Beräknar signalriktning
Antennmatriser för riktningsidentifiering är normalt indelade i tre matristyper: ULA (uniform linear array), URA (uniform rectangular array) och UCA (uniform circular array). Som namnet antyder är den linjära matrisen endimensionell medan de rektangulära och cirkulära matriserna är tvådimensionella. ULA är enklast att utforma och implementera, men dess nackdelar beror på att det endast kan beräkna girvinkeln genom att anta att den spårade enheten rör sig konsekvent i samma plan. Om det inte är fallet försämras precisionen. URA:er och UCA:er kan tillförlitligt mäta både gir- och stigvinkeln (figur 6).
 Figur 6: AoA- och AoD-teknikerna för riktningsidentifiering kräver antennmatriser, vars vanliga former inkluderar linjär, rektangulär och cirkulär. Varje typ av matris kan hämta information och stig- och girvinkel, men de rektangulära och cirkulära typerna ger mer tillförlitliga girvinkeldata. (Bildkälla: Silicon Labs)
Figur 6: AoA- och AoD-teknikerna för riktningsidentifiering kräver antennmatriser, vars vanliga former inkluderar linjär, rektangulär och cirkulär. Varje typ av matris kan hämta information och stig- och girvinkel, men de rektangulära och cirkulära typerna ger mer tillförlitliga girvinkeldata. (Bildkälla: Silicon Labs)
Att utforma en antennmatris för riktningsidentifiering är inte en lätt sak. Om antennerna till exempel placeras i en matris stör de varandras svar genom ömsesidig koppling. För att hantera sådana effekter kräver beräkningsalgoritmerna ofta fördefinierade matrissvar. Till exempel innebär en populär kommersiell algoritm att matrisen matematiskt antas bestå av två identiska undermatriser. För dem som saknar antennexpertis finns det dock antennmatrisprodukter med definierade egenskaper.
En effektiv antennmatris säkerställer att exakta IQ-samplingar samlas in. Men rådata räcker inte för att avgöra signalriktningen. Data måste behandlas för att väga in flervägsmottagning, signalpolarisering och utbredningsfördröjningar, brus och skakning.
Eftersom RF-riktningsidentifieringen inte är en ny disciplin finns flera etablerade matematiska tekniker för att beräkna ankomstvinkel baserat på IQ-samplingar som inhämtats i verkliga tillämpningar. Problemdefinitionen – dvs. beräkningen av ankomstvinkeln (beräkningen för utgångsvinkeln är liknande) för en utsänd (smalband) signal som ankommer till mottagningsmatrisen – är enkel, men matematiken som krävs för att lösa det är betydligt mer komplex.
Enkelt beskrivet givet en datauppsättning av IQ-samplingar för varje antenn i matrisen beräknar de kommersiella algoritmerna först en datavektor "x" som baseras på följande formel (och antaget att signalerna är fasförskjutna och sinusformat skalade (smalband)):
![]() Ekvation 1
Ekvation 1
Där "a" är en matematisk modell för antennmatrisen (styrvektorn),
"s" är den inkommande signalen och "n" är en brusterm.
X används sedan för att generera IQ-samplingens kovariansmatris "Rxx" med formeln:
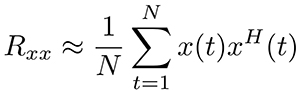 Ekvation 2
Ekvation 2
Det här provets kovariansmatris används sedan som indata för huvudberäkningsalgoritmen. En av de mest populära och beprövade algoritmerna för frekvensberäkning och radioriktningsidentifiering är MUltiple SIgnal Classification (MUSIC). Tekniskt sett använder MUSIC egenvektornedbrytning och egenvärdena för kovariansmatrisen för att beräkna AoA baserat på egenskaperna hos signal- och brusdelytorna.
Den använda formeln är
![]() Ekvation 3
Ekvation 3
Där "A" är en diagonal matris som innehåller egenvärdena och "V" är en matris som innehåller motsvarande egenvektorer.
När V isoleras kan det användas i en formel som genererar ett pseudospektrum med en topp vid ankomstvinkeln för den mottagna signalen (ekvation 4):
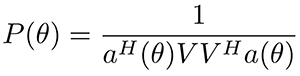 Ekvation 4
Ekvation 4
Och det resulterande spektrumet tar den form som visas, med toppen i den riktning från vilken den sända signalen kommer (figur 7).[2]
 Figur 7: MUSIC-algoritmen använder IQ-prov för att generera et kraftpseudospektrum med en topp som identifierar den sändande enhetens position. Det här exemplet visar ett 2D-pseudospektrum där sändarenheten har 50 graders girvinkel och 45 graders stigningsvinkel. (Bildkälla: Silicon Labs)
Figur 7: MUSIC-algoritmen använder IQ-prov för att generera et kraftpseudospektrum med en topp som identifierar den sändande enhetens position. Det här exemplet visar ett 2D-pseudospektrum där sändarenheten har 50 graders girvinkel och 45 graders stigningsvinkel. (Bildkälla: Silicon Labs)
Att köra riktningsidentifieringsalgoritmer är beräkningsintensivt och kräver gott om RAM- och flashminne.
Kommersiella Bluetooth 5.1-produkter med lämpliga resurser är redan tillgängliga. Till exempel erbjuder Dialog Semiconductor DA14691 Bluetooth 5 LE SoC för positionsservicetillämpningar. Kretsen drivs av en Arm® Cortex®-M33-mikroprocessor och inkluderar 512 kbyte RAM. Silicon Labs has lanserat en Bluetooth 5.1-stack för sin EFR32BG13 BLE SoC. Kretsen använder en Arm Cortex-M4-mikroprocessor med 64 kbyte RAM- och 512 kbyte flashminne.
Nordic Semiconductor har tagit ett steg längre genom att lansera ny riktningsidentifieringsmaskinvara, i form av nRF52811. Den här BLE SoC är Bluetooth 5.1-kompatibel och integrerar en Arm Cortex M4-mikroprocessor tillsammans med flerprotokollradion från Nordics högkvalitativa nRF52840 trådlösa SoC. Kretsen inkluderar 192 kbyte flashminne och 24 kbyte RAM.
Del 2 i den här artikeln förklarar hur du kan använda utvecklingsplattformar som baseras på dessa SoC:er och stackar (tillsammans med ytterligare komponenter inklusive antennmatriser, förknippade mikroprocessorer och förknippat minne samt fast "lokaliseringsmotorprogramvara") för att implementera praktiska lokaliseringstjänsttillämpningar som tillgångsspårning och IPS.
Slutsats
De senaste förbättringarna av kärnspecifikationen som tillämpas i Bluetooth 5.1 gör det enklare att komma åt IQ-data. Dessa data kan användas för att mata RF-riktningsidentifieringsalgoritmer som beräknar AoA eller AoD för en Bluetooth-radiosändning och sedan använder den här informationen för att beräkna positionen hos en sändare i två eller tre dimensioner.
Men trots att algoritmerna kan användas som bas för praktiska positionsservicetillämpningar som tillgångsspårning och IPS beror deras precision på en väldesignad antennmatris, en beprövad RF-riktningsidentifieringsalgoritm samt tillräckliga processor- och minnesresurser för att utföra de komplexa beräkningarna.
Som del 2 i den här serien kommer att visa gör tillgängligheten till kommersiella Bluetooth 5.1-riktningsidentifieringsplattformar, antennmatriser och fast lokaliseringsmotorprogramvara det enklare för konstruktörer att börja bygga lokaliseringstjänsttillämpningar med centimeterprecision trots att utvecklingsarbetet fortfarande är långt från enkelt.
Referenser
- Bluetooth Direction Finding: A Technical Overview, Martin Wooley, Bluetooth SIG, mars 2019.
- Understanding Advanced Bluetooth Angle Estimation Techniques for Real-Time Locationing, Sauli Lehtimaki, Silicon Labs, 2018
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.