What is the Difference Between Timing Jitter and Phase Noise?
Serial data transmission rates continue to climb in response to an ever-increasing demand for more data, more quickly. As data rates increase, timing margins decrease, thereby pushing designers to minimize uncertainty in data timing. Specifying uncertainty in data timing can take either of two forms depending upon the discipline you come from. The two parameters are jitter and phase noise.
Phase noise and jitter both indicate the timing stability of a signal and are related to each other. In essence, these are two ways of characterizing the timing uncertainty in a clock or data stream. Phase noise is the instability of a signal’s frequency, expressed in the frequency domain, while jitter is a variation of the signal waveform in the time domain.
The selection of which domain to consider is usually dependent on the application: RF engineers will generally look at phase noise, while digital designers are more likely to use jitter.
Definition and measurement of jitter and phase noise
Jitter is the variation of a signal’s timing from its ideal and is usually measured with an oscilloscope. Jitter can take several forms, including edge or phase jitter (called time interval error), period jitter, or cycle-to-cycle jitter (the difference between the periods of adjacent cycles). Jitter of any type can be broken down into two main components: random or deterministic jitter. Random components are generally unbounded, meaning that peak jitter values increase with increasing time. Deterministic jitter elements are bounded and do not increase with time. Each of these main components incorporates multiple sub-components that are beyond the scope of this article.
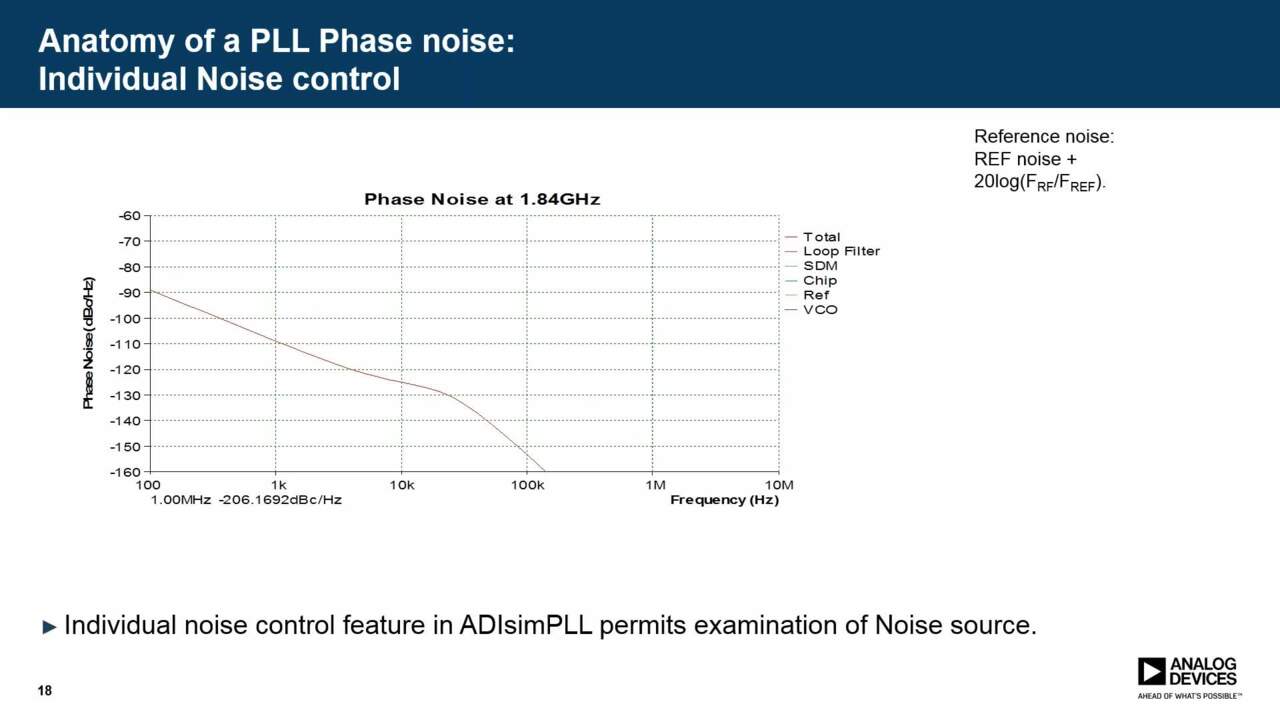
Phase noise looks at the signal power adjacent to the clock fundamental in the frequency domain. Variations in signal phase or frequency are manifest in the width of the spectral line. The greater the timing instability, the broader the spectral line. Figure 1 provides us an example.
 and phase noise (lower traces) of a clock signal") Figure 1: A comparison of jitter (upper trace) and phase noise (lower traces) of a clock signal. (Image source: DigiKey)
Figure 1: A comparison of jitter (upper trace) and phase noise (lower traces) of a clock signal. (Image source: DigiKey)
The upper trace is a view of an edge of a 100 megahertz (MHz) clock signal. It is viewed with display persistence turned on to give us a history of edge locations. The clock edge is moving horizontally in time. This variation is the clock edge jitter. In this case, there are about 100 picoseconds (ps) of peak-to-peak jitter.
The lower traces show horizontally expanded views to the frequency spectrum of the 100 MHz clock signal using a power density display. There are four overlaid spectra showing the differences in spectral width for edge jitter values of 10, 50, 100, and 500 ps. Note the broadening of the spectral line for increasing amounts of jitter. Phase noise is generally measured using a spectrum analyzer or a dedicated phase noise test set and is generally presented at a fixed frequency offset from the clock fundamental frequency. For instance, phase noise might be specified as -96 decibels relative to carrier (dBc) at 10 kilohertz (kHz) offset from the carrier.
Controlling jitter and phase noise
Designers can control jitter and phase noise in clock distribution chains by employing low-phase-noise clock generators such as Analog Devices’ ADF4001BCPZ. It offers a 200 MHz bandwidth and has a typical phase noise specification of -99 dB/Hz at 1 kHz offset from the clock frequency (Figure 2).
 Figure 2: The Analog Devices ADF4001BCPZ is a 200 MHz low-phase-noise clock generator with a typical phase noise specification of -99 dB/Hz at 1 kHz offset from the clock frequency. (Image source: Analog Devices)
Figure 2: The Analog Devices ADF4001BCPZ is a 200 MHz low-phase-noise clock generator with a typical phase noise specification of -99 dB/Hz at 1 kHz offset from the clock frequency. (Image source: Analog Devices)
Distributing a clock to multiple devices requires a zero-delay clock buffer. In addition to guaranteeing very low timing skew, these devices also reduce jitter due to their internal phase-locked loops (PLLs). As an example, Cypress Semiconductor’s CY2308SXC-3T zero-delay buffer has two banks of four outputs. It operates over a frequency range from 10 to 133 MHz and offers 60 ps typical cycle-to-cycle jitter at the output (Figure 3).
 Figure 3: The Cypress Semiconductor CY2308SXC-3T zero-delay buffer in a 16-SOIC package offers 60 ps typical cycle-to-cycle jitter at the output. (Image source Cypress Semiconductor)
Figure 3: The Cypress Semiconductor CY2308SXC-3T zero-delay buffer in a 16-SOIC package offers 60 ps typical cycle-to-cycle jitter at the output. (Image source Cypress Semiconductor)
Conclusion
So, the answer to the original question is that phase noise and jitter are two different views of the same information about clock or data timing stability, with phase noise being the view in the frequency domain and jitter being the time domain interpretation. Good component selection helps reduce both of them.
Om skribenten

Arthur (Art) Pini arbetar som skribent på DigiKey. Han har en kandidatexamen i elteknik på City College i New York och en master i elteknik från City University i New York. Arthur har mer än 50 års erfarenhet inom elektronik och har innehaft nyckelroller inom konstruktion och marknadsföring på Teledyne LeCroy, Summation, Wavetek och Nicolet Scientific. Han är intresserad av mätteknik och har lång erfarenhet av oscilloskop, spektrumanalysatorer, arbiträra vågformsgeneratorer, digitaliserare och effektmätare.

Have questions or comments? Continue the conversation on TechForum, DigiKey's online community and technical resource.
Visit TechForumRelaterade bloggar


Fler bloggar av den här skribenten