Hur man väljer och använder elektromekaniska kontaktorer för tunga trefas växelströmsmotorer
Bidraget med av DigiKeys nordamerikanska redaktörer
2022-02-16
Ingenjörer som ska isolera relativt höga spänningar och strömmar med en liten spänningssignal använder sig vanligtvis av reläer. En konventionell lågspänningsomkopplare aktiverar reläet som i sin tur kopplar på den höga strömförsörjningen. Elektromekaniska reläer (EMR) är billiga och kan hantera relativt höga spänningar, medan Solid State-reläer (SSR) eliminerar slitage av kontakter och ljusbågar.
När det gäller frekventa växlingar på flera hundra volt och tiotals ampere (och mer) har båda typerna utmaningar. Ljusbågar vid dessa höga belastningar sliter snabbt ut det elektromekaniska reläets kontakter, medan läckströmmar i Solid State-reläer orsakar överhettning. Konstruktörer behöver ett alternativ för dessa krävande tillämpningar.
Den mindre välkända elektromekaniska kontaktorn (EMC) är en robust ersättare för reläer. Anordningarna är en beprövad teknik och är tillgängliga från många välrenommerade leverantörer. Eftersom det finns dussintals alternativ blir urvalsprocessen snabbt förvirrande om man inte har en detaljerad inblick i den elektromekaniska kontaktorns funktion.
Artikeln förklarar kortfattat skillnaden mellan elektromekaniska reläer och kontaktorer, hur kontaktorer fungerar och fokuserar sedan på hur en viss tillämpning påverkar valet av produkt som det första steget mot en lyckad konstruktion. Konstruktionsvalen kommer att illustreras med hjälp av effektkontaktorerna i serien SIRIUS 3RT från Siemens som används i en implementering med en IE3-elmotor.
Skillnaden mellan elektromekaniska reläer och kontaktorer
Eftersom den utsätts för full ström i kretsen när den är stängd är det opraktiskt att använda en strömbrytare för att sätta på och stänga av en högeffektenhet, som t.ex. en stor trefasmotor. Strömbrytaren bildar en farlig ljusbåge när den slås om och den överhettas vid drift. Lösningen är att använda en svag strömkrets, som slås på och av med en konventionell strömbrytare, för att aktivera högeffektkretsen. Det är syftet med ett elektromekaniskt relä.
Elektromekaniska reläer använder en spole som får energi från en lågeffektkrets för att skapa ett magnetfält som sedan ger en impuls till en rörlig kärna som i sin tur öppnar eller stänger kontakterna (normalt slutna (NC) eller normalt brutna (NO)). De elektromekaniska reläerna kan koppla om en AC- eller DC-belastning upp till dess maximala effekt. De viktigaste fördelarna med elektromekaniska reläer är en låg kostnad och garanterad isolering vid alla spänningar som ligger under enhetens dielektriska klassning. (Se "Användning av specialiserade Solid State-reläer med lågt brus för att begränsa EMI och uppfylla kritiska standarder.)
Det finns dock en gräns för hur mycket effekt ett elektromekaniskt relä kan hantera. När belastningen är t.ex. en trefasmotor med en effekt på mer än några kW genererar växling med hjälp av ett elektromekaniskt relä en alltför stor ljusbåge vilket snabbt sliter ut reläet. Alternativet är en elektromekanisk kontaktor, en slitstark och robust industriell motsvarighet till ett relä som är konstruerad för att på ett tillförlitligt sätt koppla om höga belastningar under tiotals miljoner cykler (figur 1).
 Figur 1: Elektromekaniska kontaktorer ersätter reläer i tunga kopplingstillämpningar. (Bildkälla: Siemens)
Figur 1: Elektromekaniska kontaktorer ersätter reläer i tunga kopplingstillämpningar. (Bildkälla: Siemens)
Elektromekaniska kontaktorer kan anslutas på ett säkert sätt till apparater som kräver hög ström och är vanligtvis utformade med funktioner för att kontrollera och undertrycka den ljusbåge som bildas vid växling under hög belastning. Anordningarna använder samma aktivering av spolar/rörlig kärna som reläer och är nästan uteslutande utrustade med NO-kontakter, även om NC-kontakter finns. NO-kontakter garanterar att kontakterna öppnas när strömmen till den elektromekaniska kontaktorn tas bort, för att stänga av strömmen till den enheten som förbrukar mycket ström. Anordningarna har antingen ett eller flera kontaktpar, även kallade poler.
Val av elektromekaniska kontaktorer
Det är relativt enkelt att bestämma sig för att välja en elektromekanisk kontaktor framför ett elektromekaniskt relä. Elektromekaniska kontaktorer är dyrare, men de är det enda alternativet för tillämpningar med hög belastning. När man väl har fastställt att en elektromekanisk kontaktor krävs är det svårare att välja den bästa elektromekaniska kontaktorn för uppgiften. Det bästa sättet att börja är att konstatera strömmen vid toppbelastning (även kallad FLA-strömstyrka) vid applikationens driftsspänning. Detta kommer sedan att avgöra vilken strömbelastningskapacitet som krävs för kontaktorn.
När det gäller exempelvis en trefasmotor, så anger tillverkaren vanligtvis driftsspänningen och FLA i databladet. Men om den informationen inte finns tillgänglig kan en ingenjör använda sig av resurser som NEC-tabellen (National Electrical Code) i USA, som innehåller uppgifter om FLA för ett antal trefasmotorer med nominell effekt och ingångsspänning. Motorerna kategoriseras enligt den Internationella elektrotekniska kommissionens (IEC) motorklassificering. En trefasmotor på 375 W har exempelvis en driftsspänning på 110 V, en FLA på 4,4 A och en motor på 1,1 kW med en driftsspänning på 220 V har en FLA på 6 A.
Därefter måste ingenjören bestämma den styrspänning som krävs för den elektromekaniska kontaktorn. Det kan vara samma spänning som används för att driva den tillhörande motorn, men ofta används en lägre spänning av säkerhetsskäl. Styrspänningar för elektromekaniska kontaktorer är vanligtvis alltid under 250 V AC.
Därefter bör man fundera på hur motorn kommer att fungera i tillämpningen. Två olika tillämpningar kan exempelvis använda en trefasmotor med samma specifikationer. Men en tillämpning som kräver att motorn är på eller av under långa perioder kräver en annan elektromekanisk kontaktor än en motor som ofta slås på och av. Den sistnämnda kommer att utsättas för upprepade strömbelastningar och måste därför vara en mer robust produkt.
IEC:s användningskategorier eller "koder" är en bra vägledning för att välja rätt elektromekanisk kontaktor för en viss tillämpning. Om den elektromekaniska kontaktorn har koden "AC-3" lämpar den sig exempelvis för elektriska motorer med "ekorrhjul" (en vanlig typ av elektrisk induktionsmotor) i tillämpningar där motorn regelbundet slås på och stängs av, medan "AC-20" lämpar sig för att koppla in och koppla bort belastningar vid nollströmsförhållanden. En felaktigt specificerad IEC-kodad elektromekanisk kontaktor kan fungera i en viss tillämpning, men den har sannolikt en mycket kortare livslängd än en korrekt kodad elektromekanisk kontaktor.
IEC-koderna är även användbara för att ta hänsyn till typen av belastning - resistiv eller induktiv - eftersom detta också har ett stort inflytande på valet av elektromekanisk kontaktor. Elektriska motorer är exempelvis induktiva belastningar, medan en värmare är en resistiv belastning.
Det är även viktigt att överväga hur många poler som kan behövas i en enda elektromekanisk kontaktor och om de ska vara NO eller NC. En tillämpning kan exempelvis kräva tre poler med NO-kontakter för respektive fas i en elektrisk motor och ytterligare ett NC-par för att tända en lysdiod för att indikera att motorn får ström men inte snurrar.
Eftersom elektromagnetiska kontaktorer ofta förmedlar relativt höga spänningar och strömmar är det dessutom viktigt att se till att enhetens isoleringsklassificering uppfyller alla säkerhetskriterier för tillämpningen.
Eftersom motorer förbrukar en betydande del av den genererade elenergin har USA och EU antagit lagstiftning för att se till att de fungerar så effektivt som möjligt. EU:s energieffektivitetsnivåer uttrycks i internationella energieffektivitetsklasser (IE) (figur 2). Enligt den nuvarande förordningen måste motorer uppnå IE2 (hög verkningsgrad), IE3 (högsta verkningsgrad) eller IE4 (högsta verkningsgrad), beroende på deras nominella effekt och andra egenskaper. Elektromekaniska kontaktorer har inverkan på elmotorns verkningsgrad, så om styrsystemet är avsett att användas i EU är det viktigt att det konstrueras enligt lämplig IE-effektivitetsklass. I USA måste motorer uppfylla NEMA:s (National Electrical Manufacturers Association) program för hög verkningsgrad, vilket kräver att standarder som de som anges för IE3 uppfylls. Kraven i Australien liknar kraven i USA.
 Figur 2: IE:s effektivitetskrav för elmotorer visar att effektivitetsförbättringarna är större för motorer med lägre effekt: IE1- och IE2-motorer är inte längre tillåtna enligt USA:s och EU:s bestämmelser. (Bildkälla: Siemens)
Figur 2: IE:s effektivitetskrav för elmotorer visar att effektivitetsförbättringarna är större för motorer med lägre effekt: IE1- och IE2-motorer är inte längre tillåtna enligt USA:s och EU:s bestämmelser. (Bildkälla: Siemens)
Kommersiella produkter
Det finns ett brett utbud av högkvalitativa elektromekaniskar kontaktorer för nästan alla tillämpningar med hög belastning. Siemens sortiment av elektromekaniska kontaktorer i serien Sirius 3RT2 visar exempelvis de moderna produkternas kapacitet för växling av elmotorer och andra tillämpningar. Apparaterna har utformats för hög driftsäkerhet, hög kontaktsäkerhet, drift vid förhöjda temperaturer och lång livslängd. Kontaktorerna kan användas upp till 60 °C utan att försämras, även om de monteras bredvid varandra. Sortimentet omfattar elektromekaniska kontaktorer i kategorierna AC-1 (icke-induktiva eller svagt induktiva belastningar såsom t.ex. värmare), AC-3 (elektriska motorer med "ekorrhjul" som ofta växlas) och AC-4 (elektriska motorer med "ekorrhjul": start, inkoppling, krypkörning). Alla produkter i serien SIRIUS 3RT2 är konstruerade för IE3- och IE4-motorer.
3RT20152AP611AA0 i serien SIRIUS 3RT2 är en elektromekaniska NO-kontaktor med tre poler i storlek S00 som är kodad för AC-3-tillämpningar. Styrspänningen är 220 till 240 V AC. Den har en utspänning på 400 eller 690 volt och en maximal strömstyrka på 7 A vid 400 V eller 4,9 A vid 690 V för en nominell maximal effekt på 3 kW vid 400 V eller 4 kW vid 690 V. Kontakterna sluts på mindre än 35 ms och bryts på mindre än 14 ms. Den har en maximal växlingfrekvens under belastning på 750 cykler per timme. Livslängden är 30 miljoner cykler med en felfrekvens på en gång per 100 miljoner cykler. När denna elektromekaniska kontaktor används är FLA för en ansluten trefasmotor 4,8 A för en motor på 480 V och 6,1 A för en motor på 600 V, vilket är tillräckligt för att driva en motor på 2,2 kW (480 V) eller 3,7 kW (600 V) (figur 3).
 Figur 3: Den elektromekaniska kontaktorn 3RT20152AP611AA0 har tre poler som är NO, vilket gör den till en lämplig konfiguration för att växla en trefasmotor. (Bildkälla: Siemens)
Figur 3: Den elektromekaniska kontaktorn 3RT20152AP611AA0 har tre poler som är NO, vilket gör den till en lämplig konfiguration för att växla en trefasmotor. (Bildkälla: Siemens)
I andra änden av SIRIUS-sortimentet finns 3RT20261AP60. Även detta är en elektromekanisk NO-kontaktor med tre poler som är kodad för AC-3-tillämpningar, men med kontaktorer i storlek S0. Styrspänningen är 220 till 240 V AC. Enheten har en utspänning på 400 eller 690 V och en maximal strömstyrka på 25 A vid 400 V eller 13 A vid 690 V för en nominell maximal effekt på 11 kW vid båda utspänningarna. FLA för en ansluten trefasmotor är 21 A för en motor på 480 V och 22 A för en motor på 600 V, vilket är tillräckligt för att driva en motor på 11,2 kW (480 V) eller 14,9 kW (600 V).
Siemens elektromekaniska kontaktorer SIRIUS 3RT2 är lämpliga för en rad olika tillämpningar men är optimerade för att växla förstklassiga IE3- eller NEMA-kompatibla motorer. En del av denna överensstämmelse kräver att den elektromekaniska kontaktorn är en effektiv del av motorns styrsystem. För att uppfylla detta krav är de elektromekaniska kontaktorerna konstruerade med funktioner såsom permanentmagneter för att minska spolens energiförbrukning och elektronisk styrning av spolen. Detta gör att hållkraften (som används för att hålla kontaktorn sluten) kan minskas till ett minimum. Den elektromekaniska kontaktorns inneboende effektförlust har minskat med 92 % jämfört med tidigare enheter.
Effektkontaktorn 3RT20171BB41 - kan exempelvis växla trefasmotorer på 2,2 kW till 7,5 kW beroende på den elektromekaniska kontaktorns utspänning - en förlust på 1,2 W per pol för en total förlust på 3,6 W när den levererar full effekt till en elmotor.
Användning av en elektromekanisk kontaktor för att starta en IE3-motor
En motordrivlina består av flera komponenter för att säkerställa en säker och tillförlitlig drift. Ett omfattande system kan exempelvis bestå av följande komponenter:
- Skyddsanordning (t.ex. ett motorstartsskydd och/eller ett överbelastningsrelä).
- Startenhet (t.ex. en elektromagnetisk kontaktor)
- Styrenhet (t.ex. ett motorstyrningssystem).
- Styrenhet (t.ex. en frekvensomvandlare).
- Elmotor
- Växellåda
- Kablage
- Driven maskin
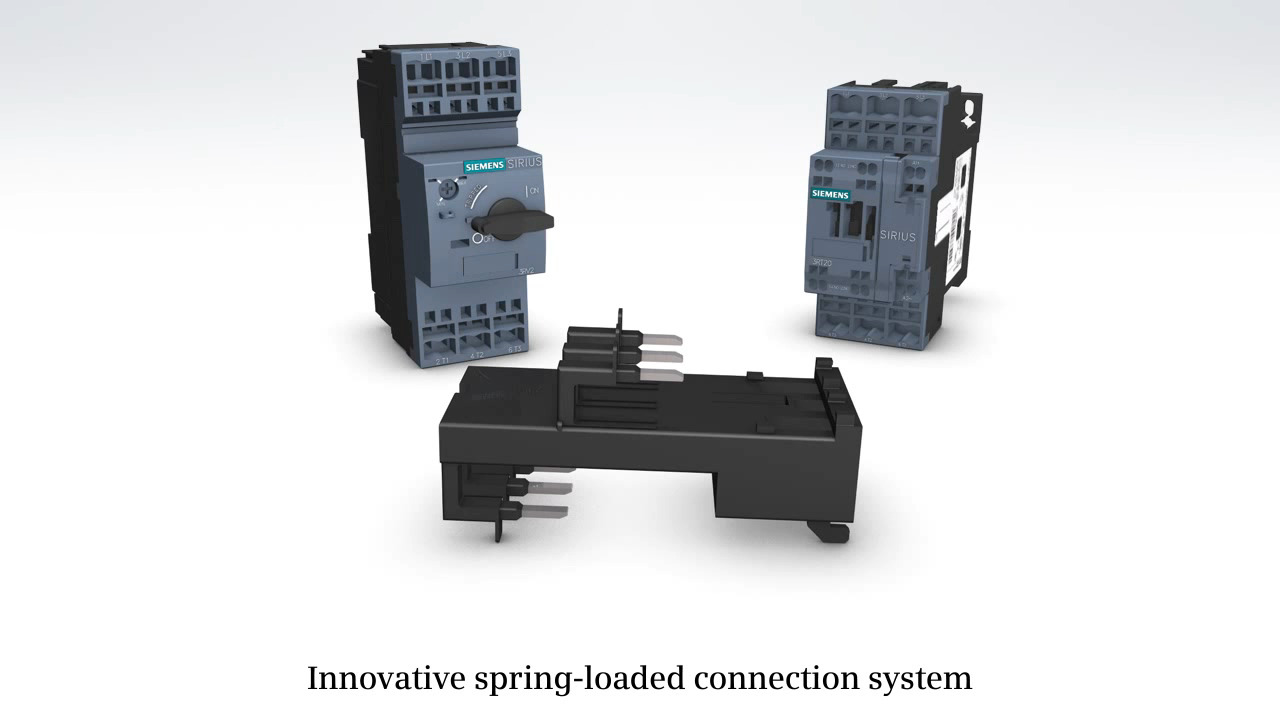
De elektromekaniska kontaktorerna SIRIUS 3RT2 är utformade som modulära enheter som monteras på en DIN-skena (eller skruvas fast) tillsammans med de andra komponenterna. De elektromekaniska kontaktorerna är konstruerade för att passa tillsammans med systermoduler för att bygga upp den önskade styrdelen av motordrivlinan (figur 4). Den modulära konstruktionen bidrar till att begränsa mängden ledningar som krävs i skåpet, och anslutningarna sker via fjäderbelastade kontakter, så inga specialverktyg behövs.
 Figur 4: Serien SIRIUS 3RT2 är modulära enheter som gör det enkelt att implementera ett motorstyrningssystem. Här används den elektromekaniska kontaktorn 3RT20171BB41 som kopplas med en 24 V DC-signal - tillsammans med en skyddsanordning och ett överbelastningsrelä för att styra en transportbandsmotor. (Bildkälla: Siemens)
Figur 4: Serien SIRIUS 3RT2 är modulära enheter som gör det enkelt att implementera ett motorstyrningssystem. Här används den elektromekaniska kontaktorn 3RT20171BB41 som kopplas med en 24 V DC-signal - tillsammans med en skyddsanordning och ett överbelastningsrelä för att styra en transportbandsmotor. (Bildkälla: Siemens)
Om den elektromekaniska kontaktorn har valts ut med omsorg blir den en plug-and-play-del i styrsystemet. Effektkontaktorerna 3RT2 har optimerats för att växla IE3-elmotorer i området 1 till 15 kW och kan användas utan ytterligare begränsningar för tillämpningar med direktstart och omvänd start. Det finns dock några viktiga konstruktionsöverväganden för ingenjörer som är mer förtrogna med IE2-elmotorer än IE3-typer när de använder de elektromekaniska kontaktorerna 3RT2. Egenskaper som påverkar utformningen av styrsystem för IE3-motorer är bland annat lägre nominella strömmar, högre startströmskvot och högre inrusningsström (figur 5).
 Figur 5: Inrusningsström, startström och och nominell motorström är viktiga parametrar att ta hänsyn till när man väljer en elektromekanisk kontaktor för en trefas växelströmsmotor. (Bildkälla: Siemens)
Figur 5: Inrusningsström, startström och och nominell motorström är viktiga parametrar att ta hänsyn till när man väljer en elektromekanisk kontaktor för en trefas växelströmsmotor. (Bildkälla: Siemens)
Nyckeln till den ökade effektiviteten hos IE3-elmotorer är lägre motorströmmar. IE3 anger dock inte en linjär ökning av effektiviteten i hela elmotorns effektområde. Det krävs istället att verkningsgraden hos elmotorer med lägre effekt ökar mycket mer jämfört med IE2-typer än hos enheter med högre effekt (se figur 2 ovan). Det innebär att för elmotorer med lägre effekt har den nominella motorströmmen sänkts avsevärt jämfört med IE2-typen. Observera att samma effekt bibehålls genom att öka driftsspänningen.
Baksidan av en minskad nominell ström är en ökning av startströmskvoten (startström/märkström) för de effektivare motorerna. Det beror på att även om startströmmen för en IE3-motor är lägre är skillnaden mellan IE2- och IE3-motorer med samma effekt inte lika uttalad för startströmmen som för märkströmmen. För motorer med lägre effekt är startströmskvoten högre än för motorer med högre effekt.
Effekten av en ökad startströmskvot är en ökning av inrusningsströmmen. Inrusningsströmmen är i huvudsak en dynamisk kompensationshändelse som beror på faktorer som anslutning av en induktiv belastning (t.ex. en motor), dynamiska strömtransienter och mättnadseffekter i motorns laminerade kärnor. Inrusningsströmmen, som kan vara upp till fem gånger högre än FLA, kan skada motorn och andra system (figur 6).
 Figur 6: Inrusningsströmmen är högre för effektivare motorer och större för enheter med lägre effekt. En lämplig utformning av styrsystemet kan mildra effekterna. (Bildkälla: Siemens)
Figur 6: Inrusningsströmmen är högre för effektivare motorer och större för enheter med lägre effekt. En lämplig utformning av styrsystemet kan mildra effekterna. (Bildkälla: Siemens)
Tillsammans med andra modulära styrkomponenter kan 3RT2 EMC användas i ett wye-delta ("YΔ")-startsystem för att begränsa inrusningsströmmen. Genom att starta motorn med full linjespänning över enhetens Y-lindningar når cirka 58 % av linjespänningen varje motorfas, vilket sänker strömmen och håller ner inrusningsströmmens topp. När motorn når sitt nominella varvtal övergår driften till Δ-läget, då full spänning läggs på varje fas (utan risk för strömrusning) och motorn kan producera full effekt.
Detta arrangemang kräver ett överbelastningsrelä som är placerat direkt i motorns matningskabel U1, V1, W1 (figur 7). Detta garanterar att överbelastningsskyddet är effektivt för alla de tre elektromekaniska kontaktorerna. För ett fullständigt genomförande krävs reläet och tre elektromekaniska kontaktorer av typen 3RT2.
 Figur 7: YΔ-krets som består av ett överbelastningsrelä i motorns matningskabel och tre elektromekaniska kontaktorer för att växla strömmen vid motorstart. (Bildkälla: Siemens.)
Figur 7: YΔ-krets som består av ett överbelastningsrelä i motorns matningskabel och tre elektromekaniska kontaktorer för att växla strömmen vid motorstart. (Bildkälla: Siemens.)
I drift utlöses Y-delen av sekvensen genom att sluta de elektromekaniska kontaktorerna K1 och K3 tillsammans. Efter en förinställd tid (vid cirka 80 % av motorns fulla varvtal) får en timer K3 att brytas och K2 att slutas för att starta deltadelen och ge full effekt till motorn.
Sammanfattning
När man växlar stora belastningar, t.ex. trefas växelströmsmotorer, är elektromekaniska kontaktorer ett rekommenderat alternativ till elektromekaniska reläer. Elektromekaniska kontaktorer är utformade för hög tillförlitlighet vid växling av tiotals miljoner operationer. Anordningarna finns för ett stort antal motorutgångar från några få till hundratals kilowatt.
De elektromekaniska kontaktorerna SIRIUS 3RT2 från Siemens är lämpliga för att koppla om trefas växelströmsmotorer från 2 till 25 kW, och deras modulära konstruktion gör det enkelt att installera dem i styrsystem. De elektromekaniska kontaktorerna SIRIUS är relativt enkla att installera, men man måste vara försiktig med implementeringen av styrsystemet för att undvika skador på motorn på grund av för hög inrusningsström.
Disclaimer: The opinions, beliefs, and viewpoints expressed by the various authors and/or forum participants on this website do not necessarily reflect the opinions, beliefs, and viewpoints of DigiKey or official policies of DigiKey.